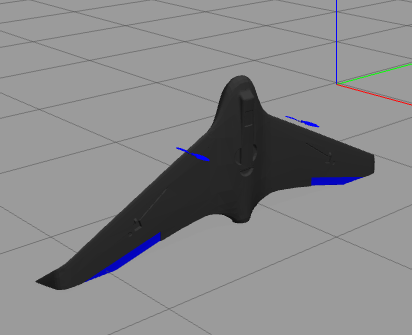
I am trying to simulate a two engine vtol using gazebo and PX4. For that I created a model on Gazebo, where I reused the standard vtol that I rotated and to which I removed two motors and centered the two remaining motors. I also removed the elevator, the rudder and the puller. I put a picture of the final result to give you a clearer idea.
In PX4 I then created a new airframe (which I added to the cmake file) by using an aiframe already created. I tried the one of the standard vtol(1040), the one of the caipirinha(3100) and the one of the duo-tailsitter(1041). The mixer that I use is the one of the caipirinha.
I manage without any problem to launch the simulation on gazebo but when I try to make my drone take off, it rises by shifting on the left then makes random movements to then crash on the ground.
Being new to PX4 I wonder if there were other files to modify or if the problem comes from the files I used and/or writed. And, if it is the case if anyone has an idea where this could come from?
I thought that it could be due to the weight or the inertia matrix chosen for the drone during the creation of the model because I took values from another program not knowing at all the values for my kind of drone.
Thank you in advance for your answers.
Léa Segaert
I am trying the same thing, and facing the exact same problem. I think it is related to the differential thrust not being used for roll in MC mode. I tried tuning the PID gains for the different axes, but the issue still persists. I also ruled out the possibility of the control surfaces not generating enough force. They do actuate during the takeoff, and the vehicle always goes awry only in the vertical plane out of the control authority of the control surfaces (The roll axes dependent on differential thrust)
Were you able to solve this somehow?
Does anyone else have any idea on how to successfully simulate dual rotor tailsitters?
Any help is much appreciated!
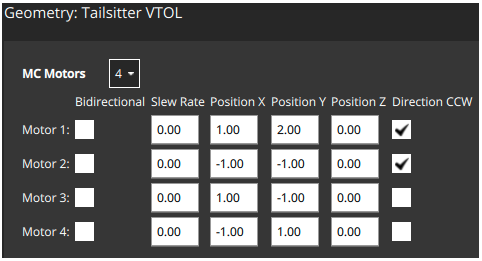
Also, can someone explain the reasoning behind the motor positions in the quad-tailsitter model? I understand the CG can be shifted and you have to compensate for that, but currently the positions look as if the configuration is unbalanced (specifically for motor 1)!
Why is the position-Y coordinate of motor 1 set as 2.00. This looks pretty unbalanced. I think the reason my tailsitter might be unstable is because of issues with the motor position. As always any help is highly appreciated! @dagar@JulianOes