Problem solved. I my case problem was in " version of bootloader in version firmware". What i mean …
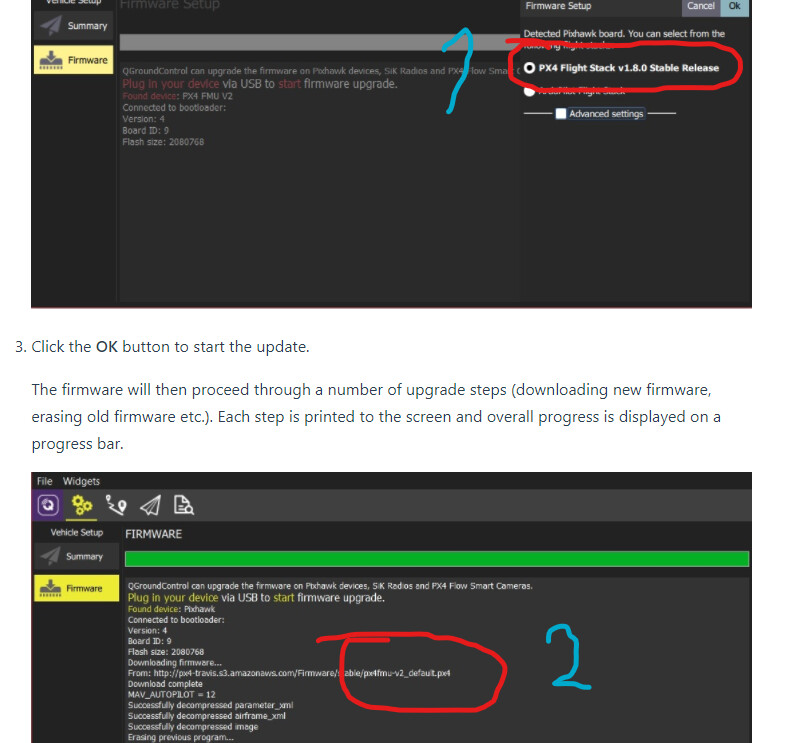
In first circle we have main version in second circle we have bootloader version.
If we have newer version of pixhawk1 (2MB Flash) version v2 may not working but not always. In my case worked reload bootloader ->change variable SYS_BL_UPDATE to 1 and load again firmware which led to load v3 bootloader version.
Redirecting to latest version of document (main)