Hello, I have a Pixhawk 2.4.8 and I’m experiencing some issues. My board frequently shows sensor errors , and I believe I need to upload a different firmware version to fix these problems.
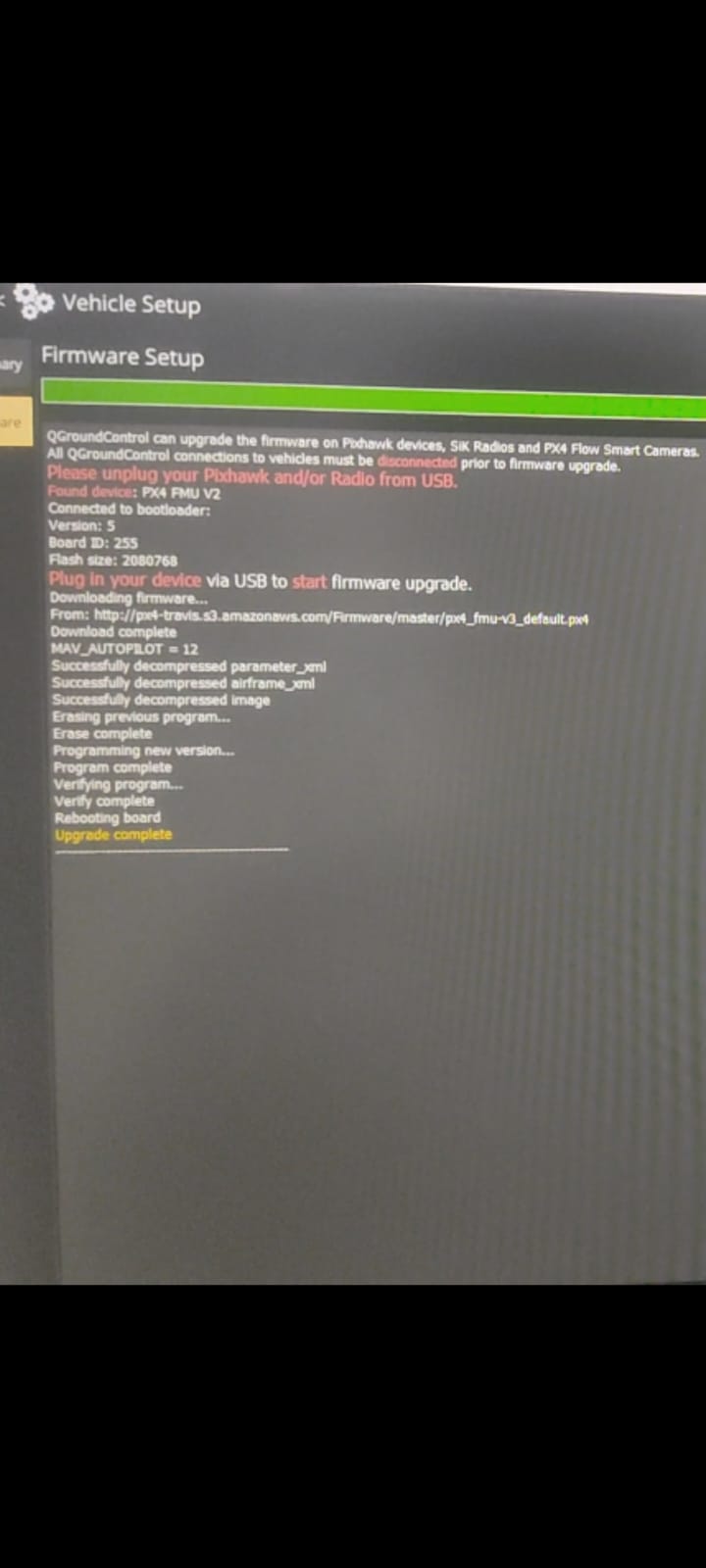
Currently, the firmware version shown in QGroundControl is 1.15.4 , and the board is detected as FMUv2 . However, when I attempt to update the firmware—similar to what is described in this discussion:
—it still installs FMUv3 , even though my hardware is FMUv2 . After flashing, the vehicle version still shows FMUv2 , not FMUv3, even though FMUv3 was supposedly uploaded.Like screenshoot below.
When I try to follow the suggestion from the link to update the bootloader using the SYS_BL_UPDATE parameter, I cannot find this parameter in my system. It simply doesn’t appear in QGroundControl.
So my questions are:
Are v1.15.4 and FMUv3-FMUv2 just different labels for the same firmware, or are they truly different firmware targets ?
How can I ensure that the correct firmware is flashed to my Pixhawk 2.4.8 ?
What is the most stable and reliable PX4 firmware version for Pixhawk 2.4.8, especially for use in fixed wing vehicles ?
If there is a custom or legacy firmware specifically built for boards like Pixhawk 2.4.8, I’d appreciate it if someone could share a direct link or explain how to compile or download it manually.
Sounds like there are two variations of the 2.4.8 which have different processors, one with 1MB flash and the other with 2MB. Regarding sensors errors, can you share a log file? Upload to https://review.px4.io/ and share a link. You can enable logging from boot with SDLOG_MODE
Thank you for your response.
I just saw your message right after I updated my post.
I’ve added the log files at the end of the post, as you suggested.
These logs were recorded after I managed to arm the vehicle with some effort by slightly bending the wings, just to get past the error.
Please note that the logs were taken while the vehicle was armed but not during flight.
Please share a link to the log which has the “sensor errors”, I don’t have time to go through all of your logs on drive and download/upload them to flight review. Providing as much detail as possible for the exact log in question will help me help you.
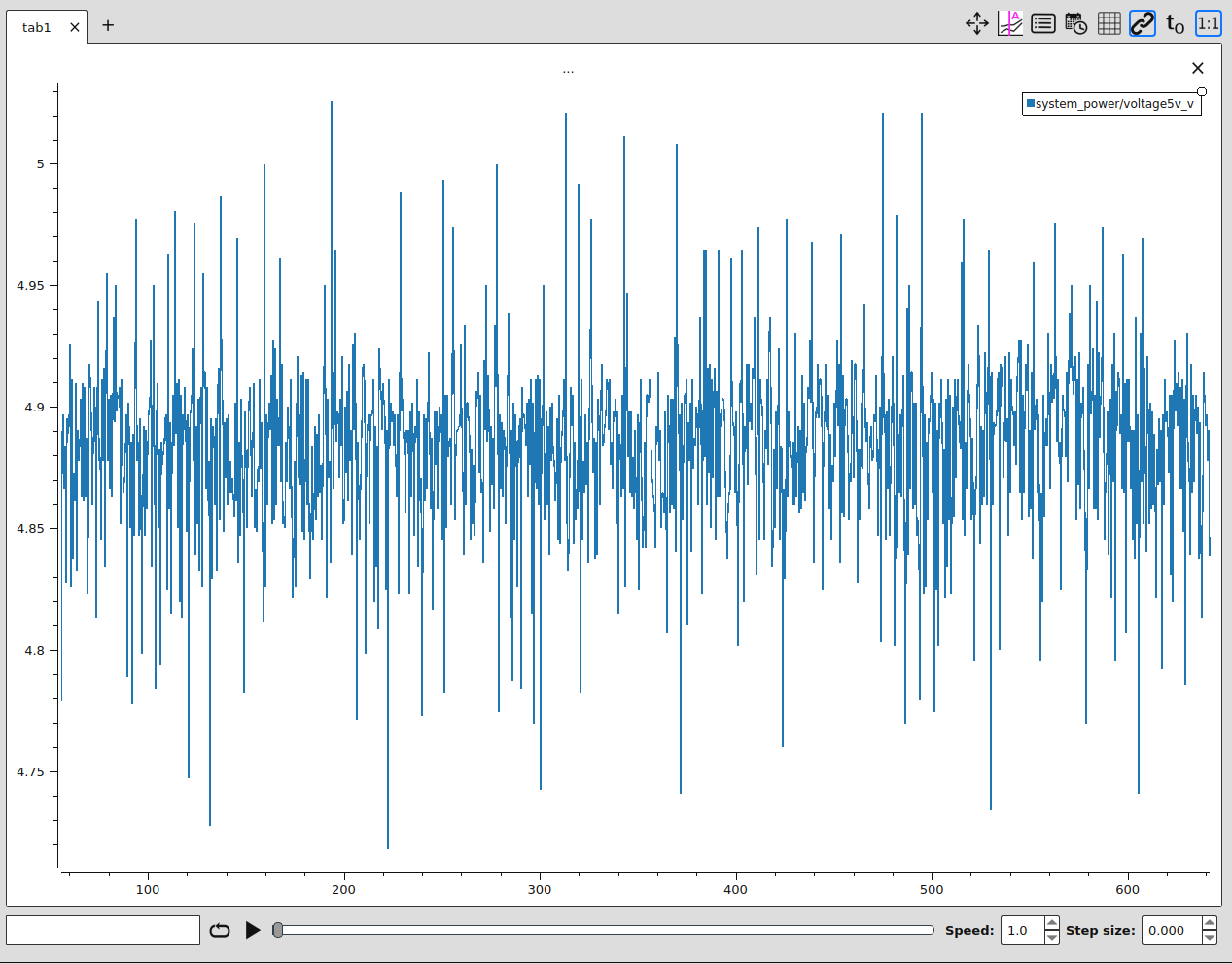
It looks like your 5V input voltage is unstable. Which power module are you using? Since 1.15 the low voltage check has been reduced from 4.8V to 4.7V, however your 5V input is very noisy.
That might be expected because in the latest logs I was getting occasional power losses in addition to the sensor errors . I have since replaced my power module cable , but I haven’t had the chance to test it in a new flight yet.
However, I do have a previous flight log from before I started experiencing the power cable issues.
Here is the earlier log:
I just want to be sure — is the issue only caused by voltage instability , or could there be something else contributing to the sensor errors?
That log has the same error messages about avionics power. Scroll to the bottom of the page and take a look at the Logged Messages. What do you mean by “sensor errors”?
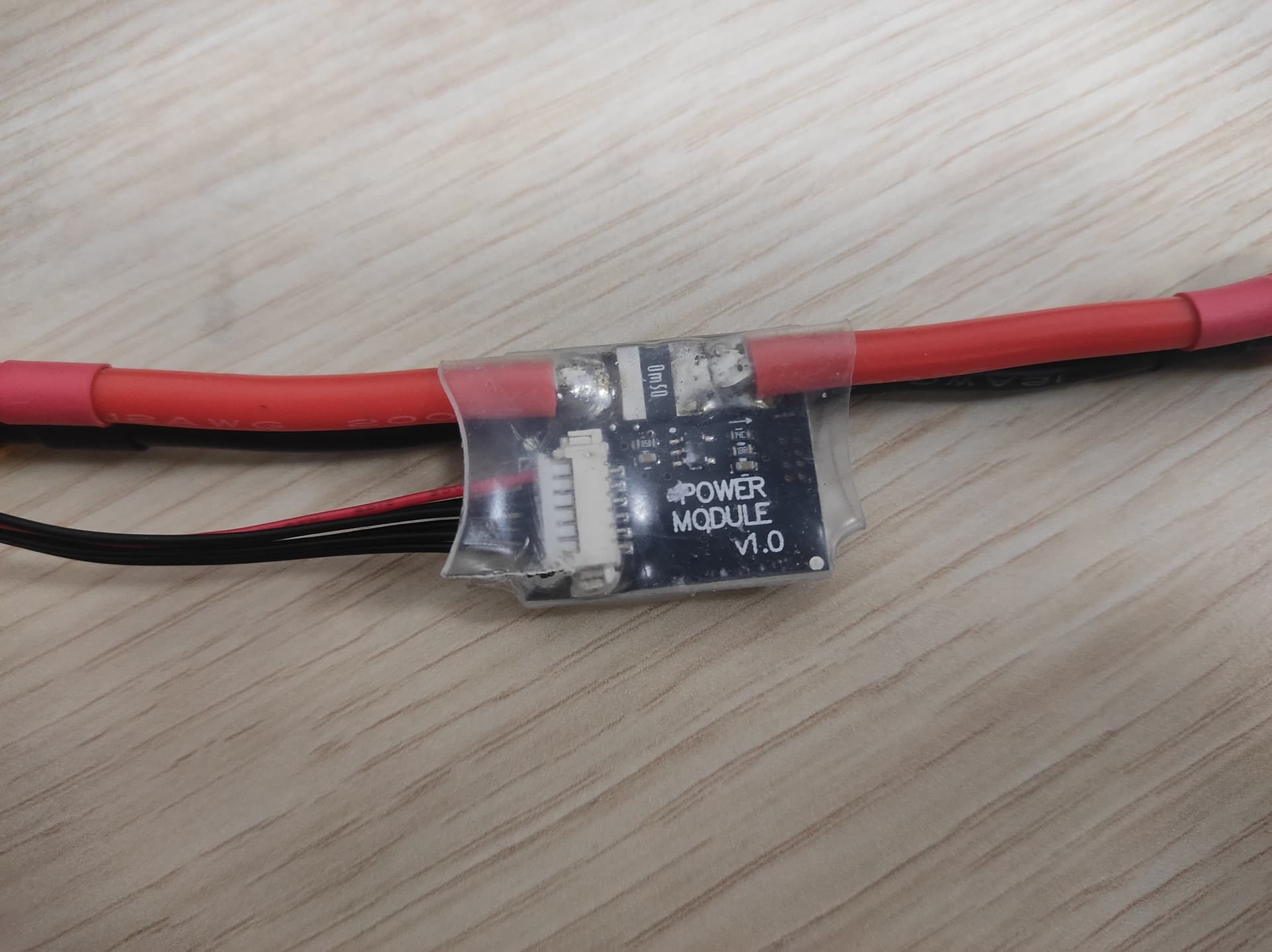
I’m using a Pixhawk 2.4.8 with a Power Module v1.0.
I measured the voltage at the Pixhawk power input using the multimeter shown in Photo 2, and I got a reading of 5.26V.
The battery I’m using is a 4S1P 22000mAh LiPo, nominal voltage 14.8V. During the measurement, the battery voltage was 16.36V.
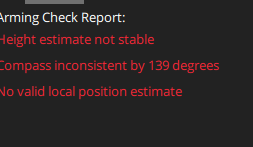
While connected to QGroundControl (including GPS), I’ve done multiple calibration attempts, yet I’ve been consistently getting the following sensor-related error messages:
Compass inconsistent by (some) degrees → This is the most frequent one.
Height estimate not stable → This appears occasionally.
Additionally, I want to note that the power socket on my Pixhawk is physically damaged, as shown in the attached photo.
I’m wondering if that could also be contributing to the issue.
The power monitor is analog, the noisy voltage is likely just noise. Although it’s possible the 5V output has ripple that a DC measurement on your multi-meter isn’t going to see. You can bypass the power errors by setting CBRK_SUPPLY_CHK.
The compass inconsistent usually indicates a poor/missing calibration or an incorrect rotation between the internal and external magnetometer.
The height estimate not stable would indicate noisy sensor data from either your baro or GPS or both.
To be completely honest this hardware is cheap and of very low quality and I would recommend using higher quality components if your budget allows. It will save you a lot of headache.