Hi Folks,
I just got a new PX4 Flight Controller kit sold by Holybro as well as a set of their Telemetry radios V3.
Right now I was wondering if there is doc’s on the meaning of the flashing led’s on the GPS module.
I missed it or?
I have been reading and I think that found out how to setup the Telemetry radios to work with Qgroundcontrol and the PX4…
I still not sure how to find the firmware updates for the PX4 as the build number on my QGD seemed to be lower than what is being talked about.
Trying to get a new flight control system and a set of new FrSky RC radios and the drone build has me real busy debugging things.
Thanks for all the info on this site.
Hello there! I’m in the middle of the same build with the X500, I’m very interested in helping one another get past the questions on this!
I’m not fully sure of the lights on the PGS but I hadn’t had a need to look into them further yet. The two telemetry radios with the kit are simple enough, plug one into TELEM1 on the PX4, then the other uses the USB cable to plug into your laptop and finish the setup with QGROUNDCONTROL (QGC).
I’m currently stuck trying to get QGC to slowly spin the motors so I can see which way they’re spinning.
I have the FrSky Taranus QX7S and I am wondering if the left joystick is supposed to be in the center when I calibrate it, or if it starts at the bottom (which is where I started when I calibrated it, I’m thinking it’s wrong though). I can hit the arm button on the GPS and then manually arm the drone with the Taranus TX but if I then push the left joystick up I get some unexpected vibrations. So I’m working out the bugs…
Best of luck and hopefully we get past out challenges soon with the community here!
Hi Blackice35,
I missed your reply and questions, and I am sorry about taking so long to get back to you! I also have the same xmtr as you and during joystick cal yes both joysticks need to be centered during start of cal. when done then the left stick is all the way down. I did figure out the lights on the GPS. green is for the non-GPS flight modes and the blue is when the GPS is locked on enough satellites
I first set this up on my tarot 680 Hex-copter and it flew very well on that frame. then put it on 500 MM quad frame that I had wanted to build and once I got all the problems sorted out it flew that frame as well. But on the 14 foot frame prototype it has been giving me a headache! It is also a quad version with 8 - 30 in props and running 50 vdc batteries and about 130 lbs! We keep this one tethered at this time! Very twitchy and not very controllable.
Good luck with your drone and enjoy flying.
Mike
Thanks for the info on the GPS LEDs @jimdgit. By any chance, do you have info on connecting cameras to the PX4 / PM07 board?
I’ve resorted to strapping my EKEN 4K camera to it and hitting record. (SIDENOTE: on the time I first took it out my drone seemed to have power surges and eventually it began to lose altitude and finally crashed My PX4 drone crash video link). Any thoughts on what happened here?
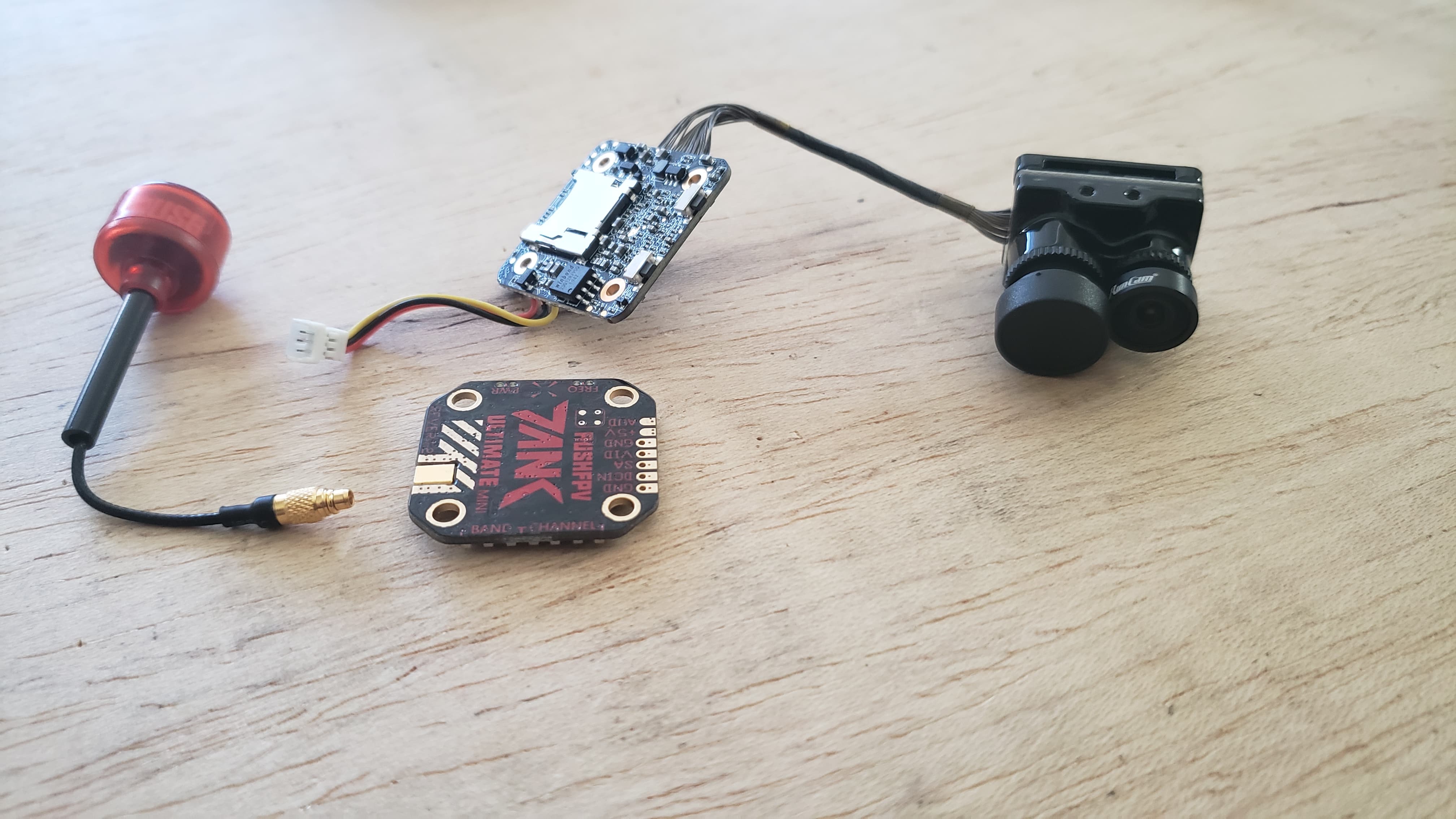
Anyways, I have my RUNCam Dual Hybrid camera and a RUSH Ultimate Mini FVP tx. My goals are to:
Be able to turn on the camera from the FrSky Taranis Q X7S (or is there a different way that it’s typically turned on? Can the FrSky be used to hit a snap photo button?
How should this be wired? I see I have power/ground/and signal.
My current expectations is that both the RUSH tx and the camera need to be powered independently. Where should these be going, to the PM07? To a BEC? The BEC has 5 wires just to add to the confusion on my end.
Then the Signal from the camera is going to go (?) to the PM07 board PWM pin 5 or 6? Is the set of pins powered (I believe not) and of not then how should I be providing the power and ground to this group?
I’m assuming once the board and the PX4 see something is connected to pin 5 or 6 I will then see it on QGroundControl.
Once the Rush tx is powered up will it be sending out a signal that my Flysight Black Pearl RC801 FPV Monitor (https://tinyurl.com/yxngyuyy) will be able to pick up on to view the signal?
That’s it for now, I’ve been working away on learning the needed steps over the past month, here’s one of my more detailed requests for help!
You should get the log file and run it thru Flight Review. https://review.px4.io/
Then post a link to here and the log gurus might help you.
If you crash always grab the log file.
Thanks, I haven’t done that yet but will give it a try. I do have an SD card in the PX4 so it should have logged the flight info. And that’s accessed through QGroundControl correct?
Okay, here’s the crash log. I’ve also found the Log section of the forum and will check the norms for posting! Much appreciated, I’ve learned a new skill in working with the PX4