Da die deutsche Community speziell an AUAV boards interessiert ist werden wir vermutlich die ersten User aus dieser Community haben - Fragen gerne hier!
Besten Dank für die Eröffnung einer deutschen Version !
Als PX4 Pixracer Beginner, habe ich auch gleich drei Fragen:
Ich habe bei AC am Boden bislang Kalibrierungen, Parameter via MP durchgeführt, z.T. über USB (Log Downlads,FW), z.T. über 3DR Radio. Das dies auch mit QGC funktioniert, ist mir bekannt.
In der Luft habe ich bislang mit Droid Planner, Andropilot z.B. Batterie und GPS Status über 3DR Radio > OTG > Tablet überwacht.
-
Ist es derzeit möglich , den Pixracer /QGC mit einem Android Tablet zu nutzen ?
Anm. Die Links unter " Android: Sign up as beta tester, then go to Google Play" laufen derzeit ins Leere. -
Falls dies nicht möglich ist, gibt es Alternativen für Android ?
-
Ist die Implementierung des ESP8266 ESP-01 als Alternative für das 3DR Radio in QGC bereits erfolgt ?
PS: Ich scheue mich nicht, auch Betaversionen zu verwenden, bin aber auf fertige Compiles für X Quad angewiesen.
PPS: Sollte das hier falsch platziert sein, bitte ich um das Verschieben bzw. um einen Thread : PX4 / Pixracer und Telemetrie.
Wenn du mit Google eingeloggt bist, funktioniert dieser Link dann nicht? https://play.google.com/apps/testing/org.mavlink.qgroundcontrol
Prinzipiell ist alles auf QGC ausgelegt. Die anderen GCS kommen viel langsamer voran und können nicht so viel abdecken.
Das ESP8266 funktioniert mit QGC und Android out-of-the-box, es braucht kein anderes Radio. Das Einzige was noch nicht fertig ist, ist Firmware update via Android - kommt aber.
Danke für die schnelle Hilfe. Ich habe übersehen, dass man mit dem Tablet zunächst Teil der QGC User Group sein muß, bevor man am Betatest der QGC Android App teilnehmen kann.
Soweit funktioniert bei mir alles super, ich bekomme auch die Telemetrie auf die Taranis. Allerdings kann ich den Kompass nicht kalibrieren.
Am Ende erscheint immer eine Fehlermeldung:
…
[cal] right side done, rotate to a different side
[cal] right side done, rotate to a different side
[cal] ERROR: Excessive offset for mag 1
[cal] calibration failed: mag
Habe auch schon ArduCopter versucht (damit habe ich mehr Erfahrung), und es scheint der interne Kompass ein Problem zu verursachen (habe auch einen Kompass am GPS-Mast).
Hat Jemand eine Idee, woran das liegen könnte?
Hallo gervais,
Danke für Deine super schnelle Antwort.
Also verdreht eingebaut ist er eigentlich nicht, es sei denn der Mag gehört nach oben :-).
Ich bin bisher davon ausgegangen, dass der Prozessor nach oben gehört.
Der externe Kompass am GPS scheint auch korrekt zu funktionieren.
Viele Grüße
Tom
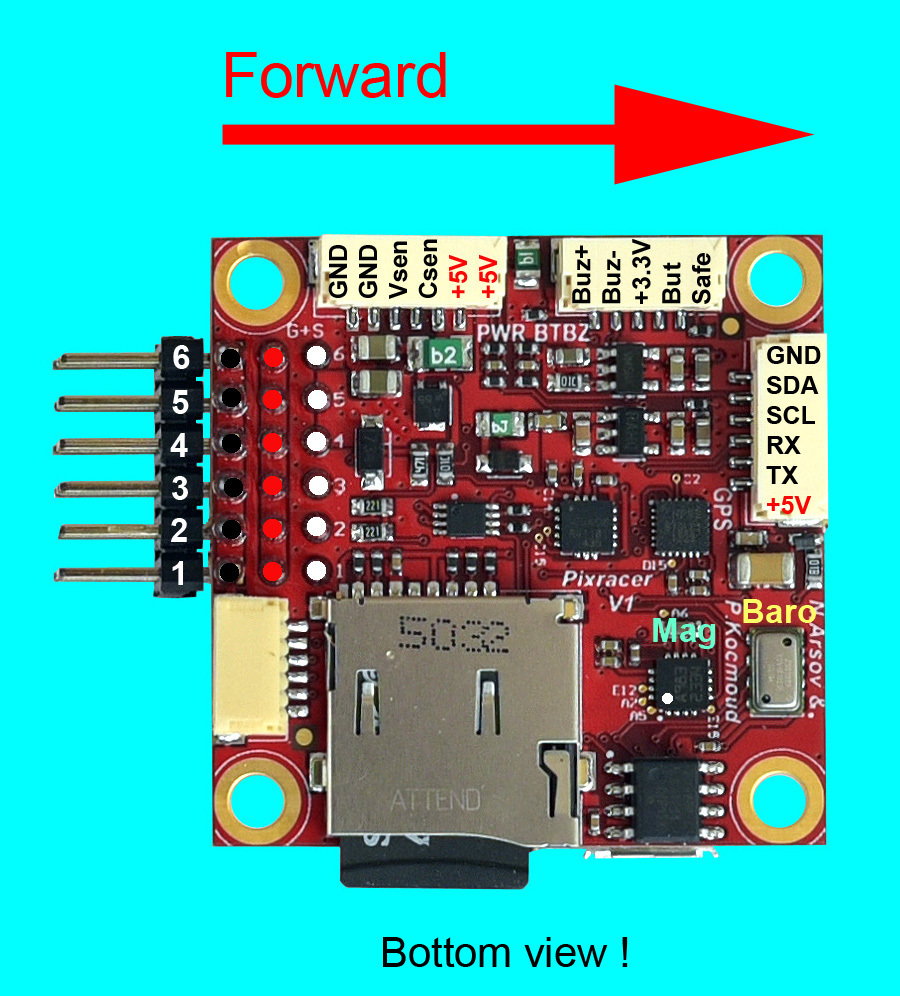
Äh nein, gemeint war Pitch 180° bzw. 90° nicht Roll. Das Bild zeigt lediglich das Verhältnis int. MAG zur Flugrichtung.(Sicht v.u., sonst sieht man den MAG Sensor nicht) Mach mal ein Bild Deines Copters damit man sehen kann, was Du wie verbaut hast.
Mache ich nachher auf jeden Fall.


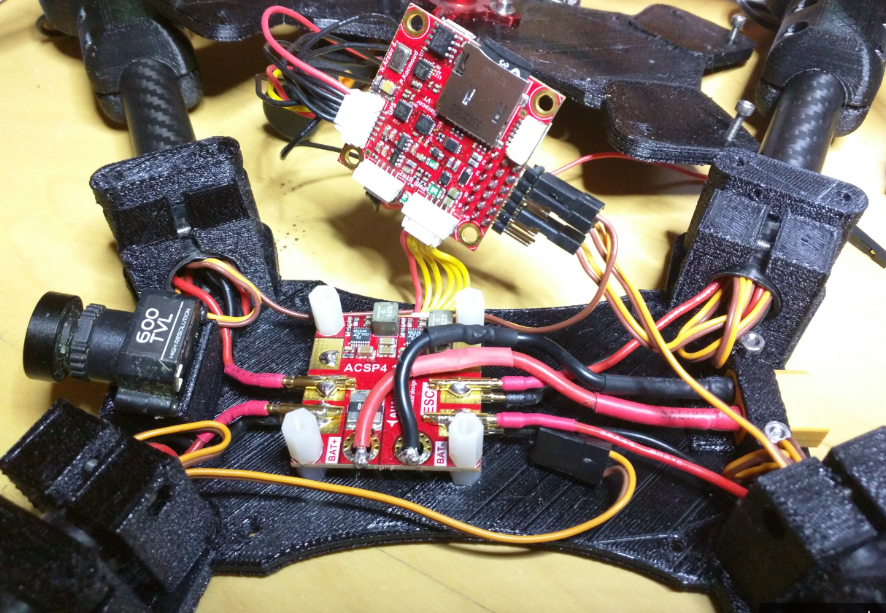
Auf Deinem Bild sieht man nicht wie die Platine innen steht. Gut möglich, dass der Mag 45°oder um 135° verdreht sitzt. Mach das mal auf.
OK, kannst Du aus dem Bild etwas erkennen? Habe den PixRacer jetzt nur hochgeklappt…
Eigentlich muss doch die Anschlussleiste für die ESCs nur nach hinten zeigen, oder?
Vorn ist ja die Kamera… müsste doch so passen denke ich.
Ich bin jetzt ziemlich sicher, dass der On-Board-Kompass gar nicht funktioniert.
Nehme ich den externen Kompass ab, driftet die Himmelsrichtung massiv. Mit dem Kompass am Mast stimmt die Himmelsrichtung ganz genau. Leider kann ich nicht armen, ohne den On-Board-Kompass… echt blöd!
Ich brauch Deine GPS Platine 
Wie gesagt, der Kompass am Mast passt ganz genau! Den hatte ich in der Richtung auch an anderen Quads!
Das lässt sich auch nur extrem schwierig im Bild festhalten.
Dann hast Du aber etwas falsch gemacht. SDA SCL vertauscht,was immer.
Fehlerhaftes Posting, sorry
Sorry, genau falsch herum gedacht… wo kann manhier editieren ? Gefunden .
Hehe. ich habe schon an mir gezweifelt 
Nur mal hypothetisch… hätte ich SDA und SCL vertauscht, würde ich doch mit dem externen Kompass keine korrekte Richtung bekommen.
Der externe Kompass ist aber offensichtlich korrekt kalibriert! Aber PIX4 will offensichtlich unbedingt auch den internen haben und der scheint mir defekt zu sein!
Ich denke der ist einfach defekt! So etwas hatte ich bisher echt noch nie!
Ausgesprochen unwahrscheinlich. Wenn Du Arducopter draufspielst, kannst Du das ja sehr leicht kontrollieren. http://www.rcgroups.com/forums/showthread.php?t=2507962
Wie man das PX4 sieht, weiß ich (noch) nicht.Geht aber bestimmt auch.
Danke für den Tip, der Thread ist schon mal sehr spannend.
Kurzes Update zu meiner Fehlersuche:
Wenn ich den externen Kompass am GPS-Mast habe, stimmt die Himmelsrichtung, die QGC anzeigt sehr genau. Klemme ich ihn ab, stimmt sie absolut nicht mehr. Deshalb gehe ich davon aus, dass nur der externe Kompass funktioniert.
Ich habe gerade zum Testen mal SDA/SCL vertauscht, und siehe da, dann stimmt die Richtung auch mit dem externen Kompass nicht mehr. Nach der erneutem Vertauschen geht der externe Kompass wieder.
Noch etwas ist sehr eigenartig, ArduCopter startet nicht mehr auf dem Board. nach dem booten geht die RGB-LED einfach aus. So langsam gehen mir echt die Ideen und die Freude am Board aus.
Echt frustrierend…