Ich komme mit der Zuordnung der Flight Modes nicht zurecht:
Ziel: Stabilized, Althold, Position Control (Wenn es sich dabei um die PX4 Version von AC PosHold handelt,d.h. bei Stillstand Loiter mit Althold ansonsten Althold) bzw. Loiter auf CH5.
Ausgegraute Felder. Immer wieder taucht bei meinen Versuchen Mission auf und dessen Feld ist (und bleibt) ausgegraut, lässt sich nicht auf disable schalten.
Ich bitte um eine verständliche deutsche Erklärung, wie ich vorgehen muß.
Wenn man nicht weiß, wie man eine Taranis koniguriert und/oder die gleiche Flight Mode Reihenfolge wie der Autor oder QGC will, ist das Video sicher hilfreich. Das Flight Mode Assignment wird allerdings in knappen 20 Sekunden abgehandelt und beschränkt sich darauf, dass die gelben Punkte gemäß der Schalterstellungen verschoben werden.
Will man diese Reihenfolge aber ändern, Mission nicht und Position Control statt Loiter wird es schwierig…:
Ich habe 3 Flight Positions (Min,Mitte,Max PWM) auf CH5 und eine 4. via Mischer und wollte eigentlich nur Stabilize, Alt, Position Control (in dieser Reihenfolge) einstellen und auf den Mischer z.B. Mission oder Land (Sobald es das gibt). Bzw. Mission auf CH 7. (Die 3DR IRIS Anfänger haben gezeigt,was passieren kann, wenn man Mission oder RTL als dritten Flight Mode wählt ;-), daher lege ich diese Modes gerne sep.)
Aber es gelingt nicht , Position Control auf die Max Position zu setzen.
Dadurch, dass das Mission Feld ausgegraut bleibt, kann ich es nicht abschalten oder sep. auf CH7 legen. Taucht immer irgendwo auf. Da kann man die gelben Punke schieben, wie man will. (Auf Stabilize kann man noch nicht einmal das,da bleibt der sonst gelbe Punkt weiß)
Ich kann mir nicht vorstellen, dass das jemand diese Reihenfolge mit Hott probiert hat.
PS: Die Reihenfolge Stabilize, Alt, Loiter funktioniert . Nur will ich Position Control statt Loiter.
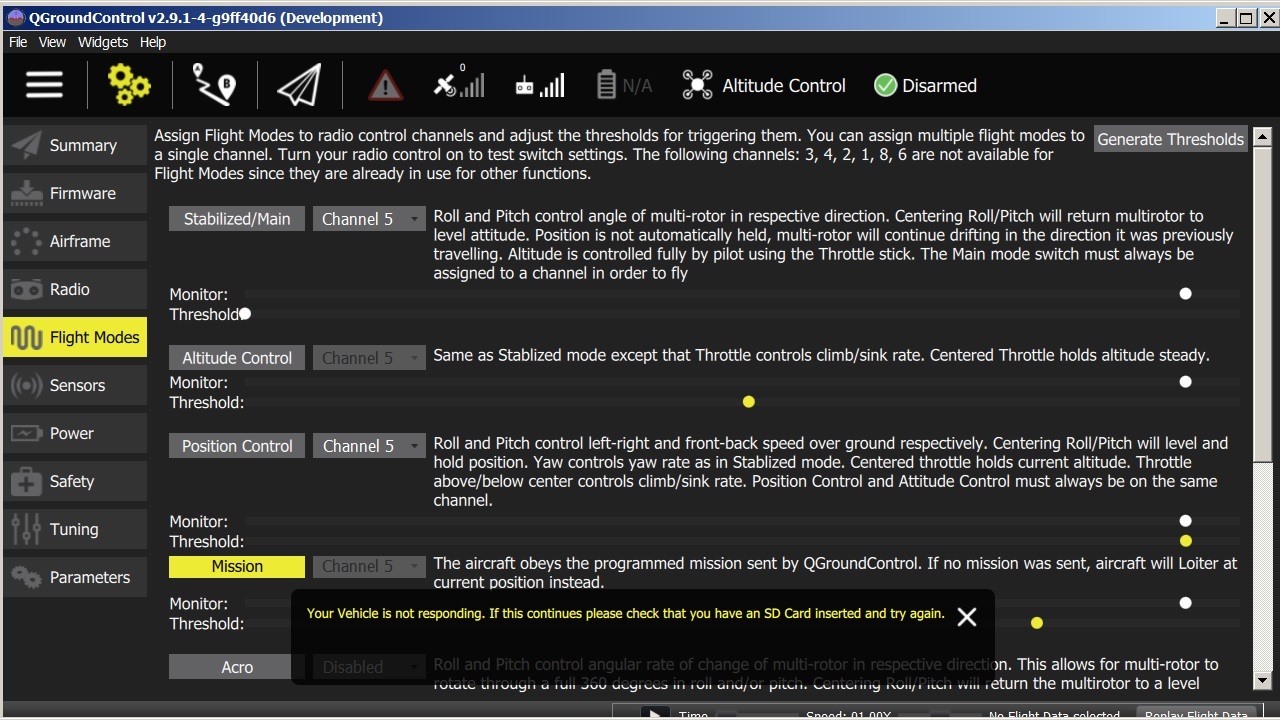
Flight Mode Assignment funktionierte zwar mit QGC auf dem PC, da aber die App auf dem Tablet etwas Anderes anzeigt und der Copter entsprechend nur im Stab verblieb, bzw. sich beim Umschalten in der Luft so verhielt , als wäre ein Billig Empfänger an mit zwei Flight Modes im benachbarten PWM Bereich am Hin und Her Schalten, (trotz weit entfernter Schaltpunkte), habe ich die RC nochmals kalibriert und hatte im Prinzip wieder (Nach dem Drücken von Generate Thresholds) das eingangs beschriebene Szenario (mit Zwangs Mission) wieder. Die ausgegrauten Felder von Althold und Mission sind immer noch da und die Statusmeldungen verkünden überflüssigerweise, dass no valid Mission vorhanden wäre. Ein Glück,dass ich keine Pistole habe,sonst hätte ich irgendwann auf den Monitor geschossen.
Es liegt auch kein Rx Defekt vor, ich habe mehrere GR-16 , die in der Kombo mit MX-16 mit AC,NAZAM,MWii,Rabbit prima funktionier(t)en. Die Schaltpunkte sind weit auseinander, ich kann mit den gelben Punkten umherschieben, wie ich will.Servoweg Veränderungen werden unmittelbar und passend angezeigt.
Die App habe ich gelöscht, da ich so hoffte, dass die aktuelle QGC app dann direkt installiert wird…aber da warte ich jetzt wieder auf demnächst.
PS: Wie immer, aktueller Build (master), QGC 2.9.0
Schließe mich da an. Wie von Gervais geschildert identisches Verhalten bei Taranis / FrSky per SBUS verbunden und einem “konventionellen” Pix. Firmware ebenfalls aktuelles Build (25.01.16, 17:00 UTC geflasht) und QGC von heute (2.9.0).
Kurze Rückmeldung: Das Problem existiert immer noch.
Da ich mittlerweile weiß, dass Loiter beim PX4 Stack anders funktioniert als bei APM (Zwangsaufstieg auf Sicherheitshöhe) statt hover at current altitude, kann ich diesen Flight Mode nicht alternativ zu PosCtl zum Testen der GNSS Funktionalität verwenden.
Natürlich werde ich das GNSS nicht mit RTL oder Mission testen .
Fragen:
Ist das eigentlich ein QGC oder ein PX4 Stack Thema ?
Warum ist das Feld von Mission ausgegraut, so dass ich dort nicht auf disable stellen kann…
Hat sich das mal ein Entwickler mit Hott angeschaut ?
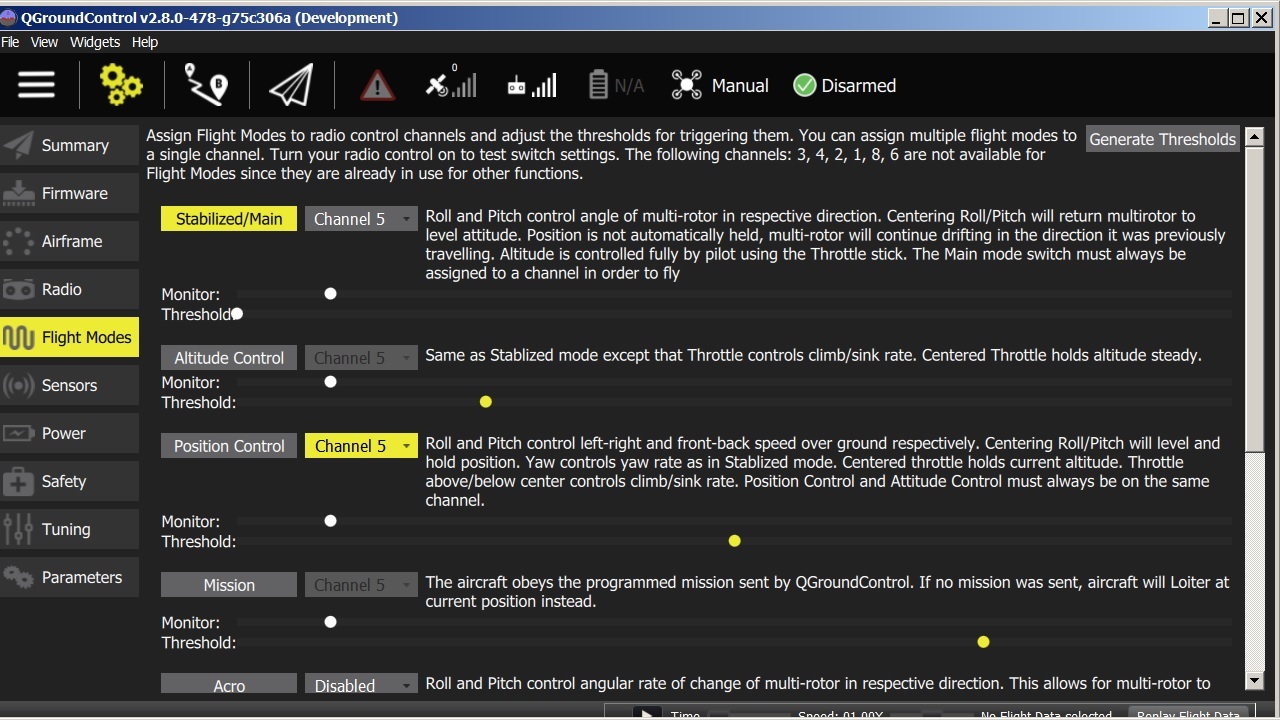
Hier nochmal ein Screenshots,der zeigt, wie QGC/PX4 hier die Thresholds ignorieren (Mission bleibt immer drin, egal wie ich da schiebe)
Immer noch fehlerhaft. Ich konnte jetzt PosCtl. aktivieren, indem ich die Thresholds (gelbe Punkte) von Althold und PosCtl. gemeinsam nach links versetzt habe.Grüne Pfeile. Versucht man das einzeln oder die gelben Punkte mit den weißen (die ja die den Output der Funke abbilden) in Deckung zu bringen, siehe rote Pfeile, taucht wieder Mission auf.
Ganz offensichtlich ein Bug. Scheint aber nur drei Leute zu stören.
um die innere Logik der Flightmodes und des Wechselns zu verstehen. Leider habe ich meinen Raben, der solche Probleme in minutenschnelle löst, nicht dabei.
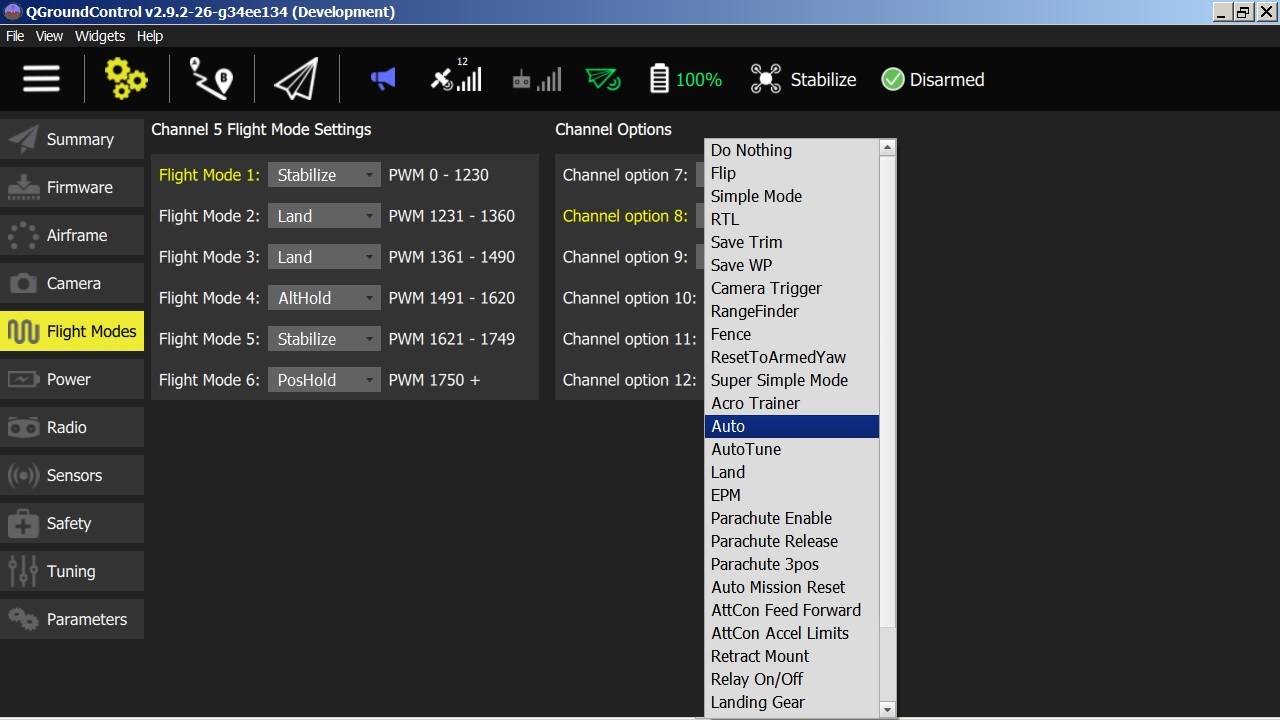
Ich hatte ja ursprünglich auch QGC in Verdacht, habe heute mal aus Versehen einen APM Copter angeklemmt und war richtig angenehm überrascht. Unter dem Reiter Flight Modes sieht man folgendes:
Hier ist noch jemand , diesmal mit Taranis, der mit einem Dreiwegeschalter unter Zwangsmission leidet.
…Ich möchte eigendlich die Pix4 ohne GPS betreiben,also nur stabilize,Attihold und Acro als Flightmodes mit einen 3Wege Schalter,aber da fangen die Probleme schon an.In QGroundcontrol schaltet er nur zwischen Stable,Acro und Mission und nicht Atti…,
This is what this thread is about. Just try to shift the thresholds (yellow dots) to the left side and not above the RC points (white dots) This worked for me as a work around. But still…
The PX4 flight mode concept is MANUAL, ASSISTED, and AUTONOMOUS.
STABILIZED, RATTITUDE and ACRO are sub-modes of MANUAL with STABILIZED the default.
The switch controlling choice between STABILIZED, RATTITUDE and ACRO must be on a different channel.
I don´t understand, why I´m not able to turn off Mission (Field to disable stays grey) .
I have the same . I just wanted to set 3 position switch (CH5) to control flight mode: STAB, ALTHOLD, POSHOLD. Now, switch in low position = STAB, mid position = ALTHOLD (but channel field stays disabled), high position = MISSION (channel field stays disabled). Don’t understand this crazy FM setup logic.


 Why not in PX4 stack
Why not in PX4 stack  ? The current way of FM selecting makes me crazy
? The current way of FM selecting makes me crazy  .
.