I am new to the px4 community but definitely excited to use it for our development. We have some very cool projects we are making but I am wondering if you guys could help me out on this one.
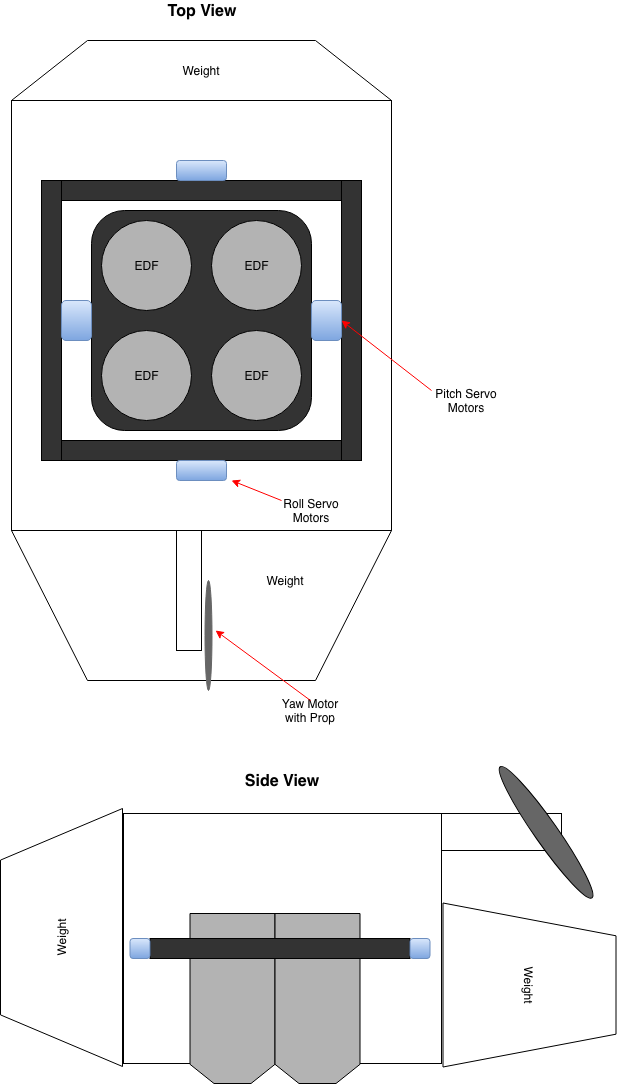
I have a new type of aircraft we built and I am trying to get a Pixhawk to control it. It has 4 EDF’s grouped in the center for the lift. The cluster is then on a 2 axis system kind of like a gimbal to control pitch and roll ( 2 servos per axis). The balancing of the craft would come mostly from the pitch and roll axis as we want to try to keep all the EDF’s at the same RPM.
I am wondering if I could get away with using a current airframe or if I would have to make a completely new one. I am getting lost in the logic of PX4 and can’t really wrap my head around how to create a new airframe. Any help is much appreciated and we also are willing to offer some money if someone would like to take on the software of this project and help us out.
You will need to make your own mixer file as well as vehicle configuration.
Also check how convergence setup works.
Can you elaborate your project more details?
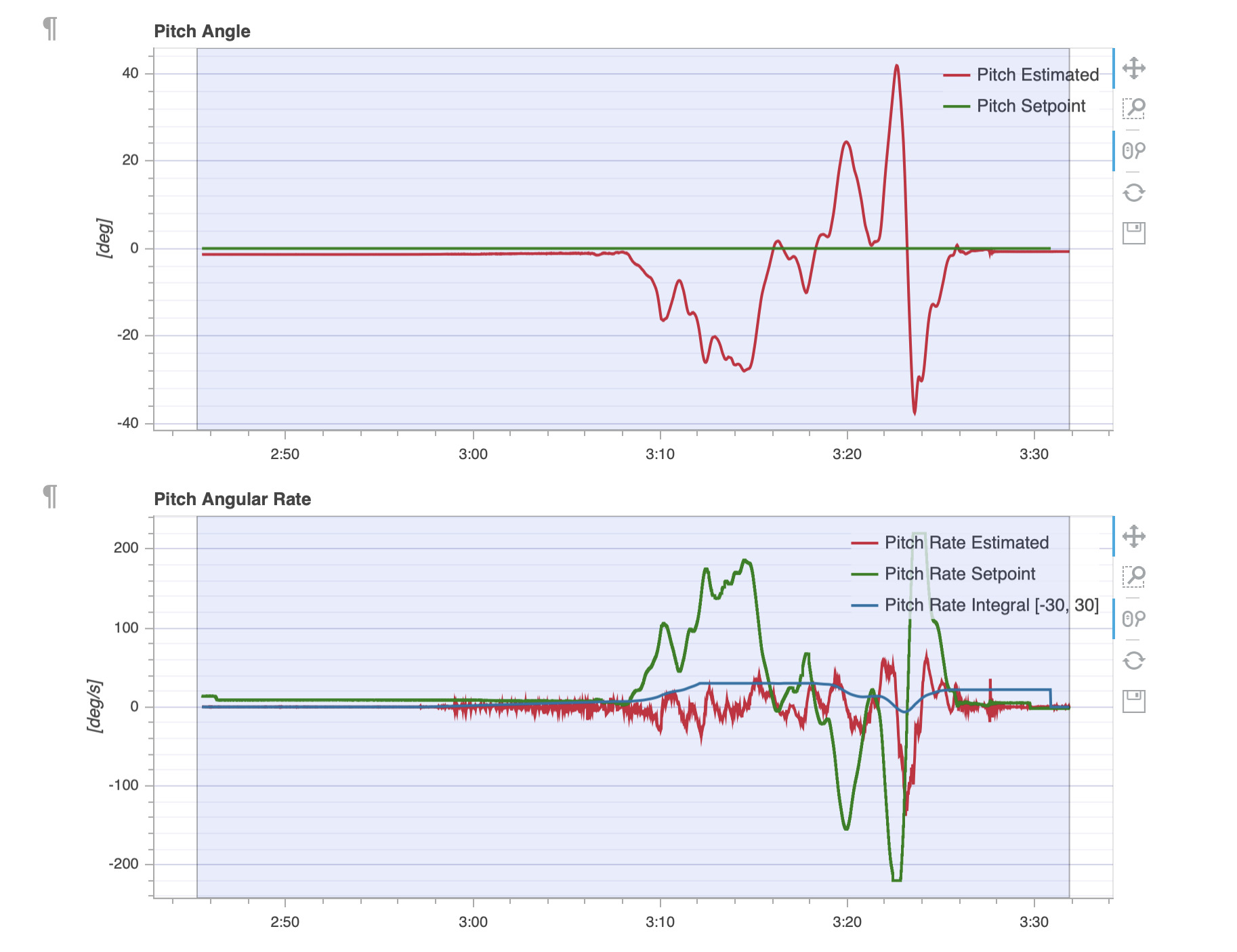
Hi Thanks for the response. I was able to create the files for the new airframe. I am having trouble tuning the parameters to get my airframe to fly steady. I have attached a few pictures of logs. You can see the craft gets out of control and the system does not respond. I have it set up on a tether system so as you can see I cut the power.
I also think you will need to show us at least a piece of drawing first.
Note that even with gimbal can control pitch and roll, you still need to counter the yaw to maintain its orientation first.
Still not clear how you control yaw. That yaw motor alone can only compensate in one direction. Does it include a servo with collective pitch like helicopter? - only that way you can compensate both yaw directions.
The Edf’s are causing torque that is opposite the yaw motor just like a regular helicopter. So when it starts to spin because of torque the yaw motor spins faster.
OK I got what you’re trying to do.
First of all, when designing a control system, it is always better to have the plant or actuator reacts as fast as possible.
What is the actuator bandwidth and response time of the gimbal? I doubt it would be fast enough moving all the weights of the clustered EDFs.
Check out this video of such example here
I think controlling by deflecting the nozzle is way better for your application unless there is specific reason to have gimbal control the EDF body. Also you can remove tail rotor as it is only dead weight.
Thanks for the reccomendation. But we need to make this configuration work. The Servos working frequency is 333hz. I do not know how to find the response time of the gimbal. Is there a parameter to assign the frequency of each output?
The response time of servo is time required from sending a command to its full deflection.
333hz you mentioned I guess is the PWM update frequency and is not what I meant.
You can measure the response time by reading the potentiometer output of the servo motor and compare it with the time you first send the command.