Hello everyone
I recently mounted a drone based pixhawk 4 (holybro) but today my drone refuses to arm and I really do not understand why.
my drone was flying very well in 1.9.0 and it seems to me that the problem occurred following the update in 1.9.1 because I have not made a parameter change in-temp.
I do not know what it can come from yet I searched the forum if solutions had been found on this kind of problem.
my gps seems to work:

below the result of a ls /dev and a ms5611 start
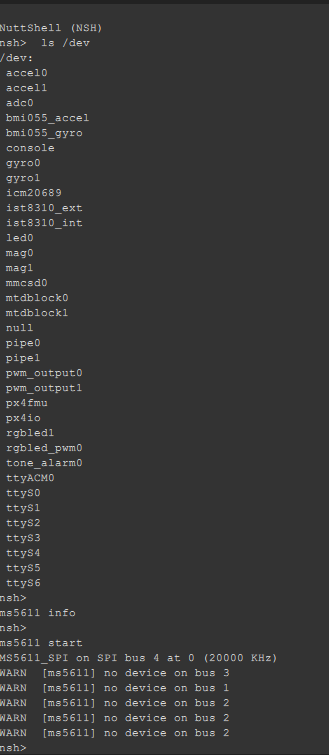
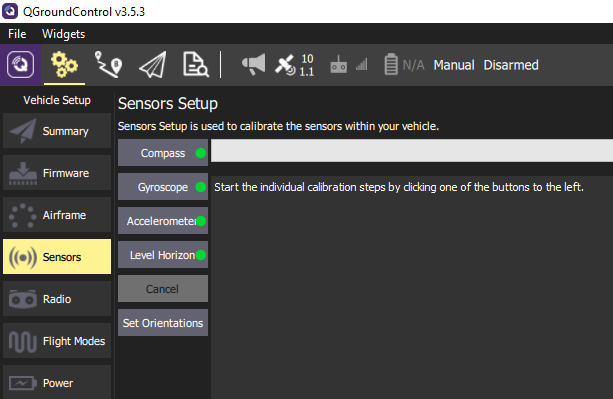
quoted qgroundcontrol software does not show me error

in the logs I see 2 error
[E] at :0 - “serialnmea: No known GPS device found. Specify the COM port via QT_NMEA_SERIAL_PORT.”
[E] at C:\projects\qgroundcontrol\src\PositionManager\PositionManager.cpp:139 - “QGCPositionManager error 1”
but I’m not sure my problem comes from there … because I’m not sure I understand the error messages either
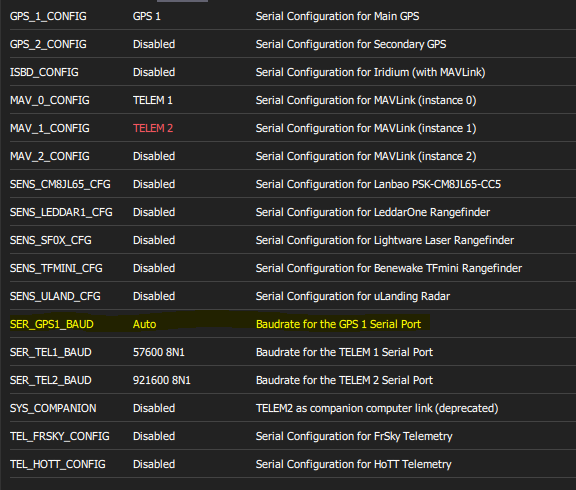
looking for this or this QT_NMEA_SERIAL_PORT parameter could be changed i have to try modified the serial port baudrate
and when restarting qgroundcontrol displays the error below.
here are the logs. (rename log.pdf in log.txt to see it)
log.pdf (3.2 MB)
If anyone could take a look at it and tell me why I can not arm my drone it would be nice!
thank you