Hello,
I have been getting a reject position control error for the past week. I created a motion capture system in matlab that is publishing to ros and sending data via Mavros to a Pixhawk 4
I am using:
PX4 1.10.0beta
Mavros 0.33.0
Mavlink Master
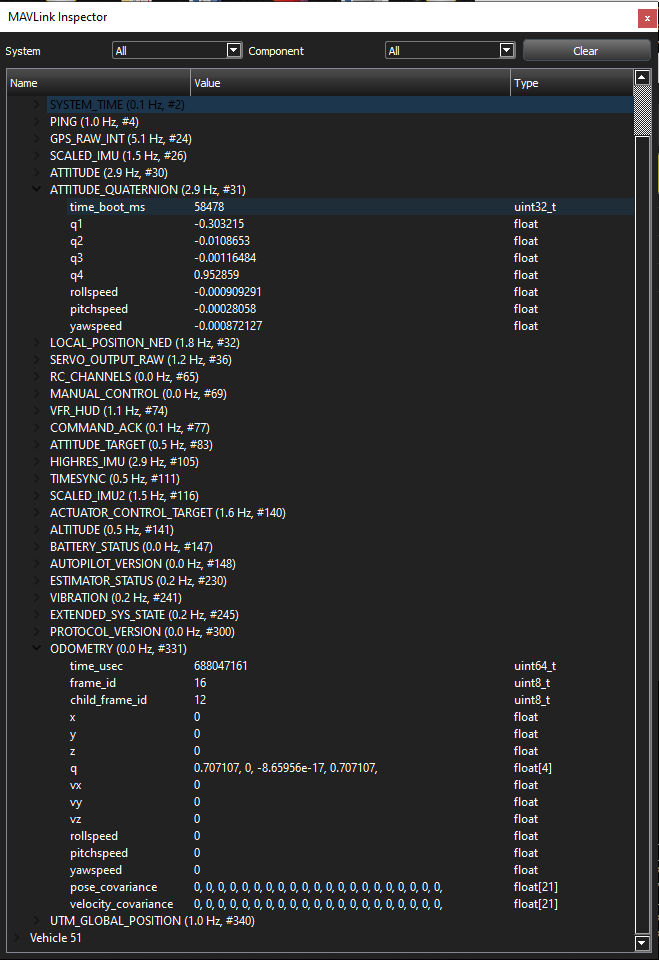
I’ve tried publishing to odometry/out and vision_pose/pose with messages from Matlab (specific to each topic). When I published to vision_pose/pose, I did see the mavlink inspector “Local_Position_NED” output the correct results (or close to them). Still get the reject position control error. Here are my parameters, mavros terminal output, echo of odometry/out terminal output:
output.pptx (49.2 KB)
Here is my log:
https://logs.px4.io/plot_app?log=89606854-59ae-42f8-b9a7-637fc9eecb5d
I don’t have any props on my motors and one of my motors is disconnected, but I believe that shouldn’t be the issue. Not sure what else to try, do you know of a next step?