I add to this topic more informations so maybe somebody who have had the same problem could help me. I can show you some examples of what works and what does not.
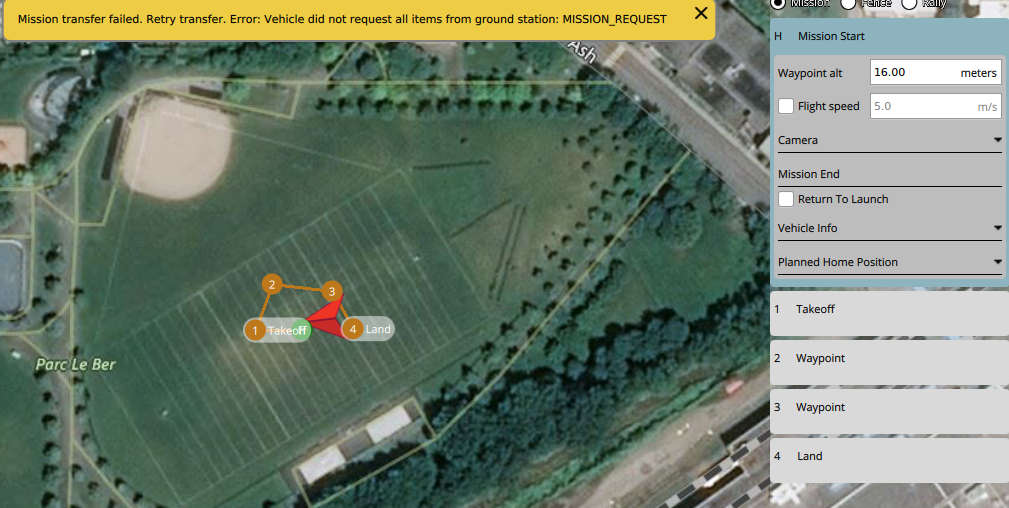
For example, when I simply try to upload a basic mission on the drone simulated by jMAVSim, here is what happens :
As you can see I am not asking something particularly difficult. The waypoints 1,2 and 3 have an altitude of 16 meters (relative to home) and the Planned home position is 13 meters up. When I try to upload, the error message I was talking about earlier in this topic is displayed, it appears here as QGC is connected to jMAVSim but the result is the same if I am connected to my Intel AERO Ready To Fly Drone.
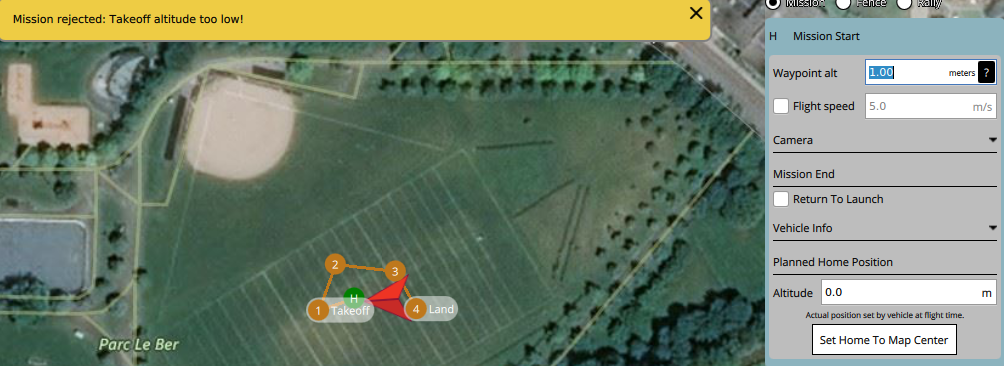
Here is another example that works this time :
So the mission is all the same except that now the waypoint altitude is 1 meter for 1,2 and 3 and the Planned home position is set at 0 meter. This time, the message says that the take off attitude is too low. In my opinion, it is weird that this message is displayed because my drone is here supposed to fly 1 meter up from the ground…
When I try to upload the mission again selecting 10 meters instead of 1, it finally works ! Well, it does work but I have to try to upload it several times since the error message
is still displayed but ends up disappearing if I insist a bit.
Last example :
If I choose to implement a mission where I never ask the drone to take off, it does upload really well without any problem !

I have tried this one with my Intel drone and it does work, except that the drone only arms and does not take off, as expected. As you can guess, it is not really interesting since the main point of a drone is to fly…
So the problem seems to be linked with the altitude but I am not 100 per cent sure. I have tried to uninstall and reinstall QGroundControl but it did not solve the problem. Hopefully somebody can help me now that I have given more info.
Thank you already for your help.
~Paul
PS : One last thing, sometimes it appears that, if insist a lot, the mission does upload but most of the time, these messages are displayed :