I want to test the autotune feature for a fixed-wing UAV but I can’t find the PID tuning tab in QGC (tried both v4.2.4 and v4.2.6). I’ve found that the feature has been introduced by @Jaeyoung-Limhere (at the time of v4.2.3), so it should be in all QGC versions since then.
As reported here it is still not available in a binary version of QGC. Is there any way to activate the autotune tab for fixed-wing without compiling the source code of QGC? Or is there a plane to release it in a binary installer?
I’m using PX4 v1.12.3 but I’ve included the changes related to autotune; it works for MC and VTOL airframes (also for VTOLs in fixed-wing mode).
@nicobatta Are you sure that change was included in v.4.2.3? I don’t think the changes are included in any of the 4.2 releases. So either you need to wait for a new stable release that include the changes, or you need to build QGC from source
The modifications to the code were merged at that time but probably the changes are still not included. Thanks, I’ll wait for a stable release that includes this feature.
In the meantime I have set up a new vtol airframe for my aircraft and I’ll use it only as fixed-wing. This workaround allows me to test the autotune feature (I’m not familiar with QT and I prefer not to compile QGC from source to avoid possible errors for inexperience).
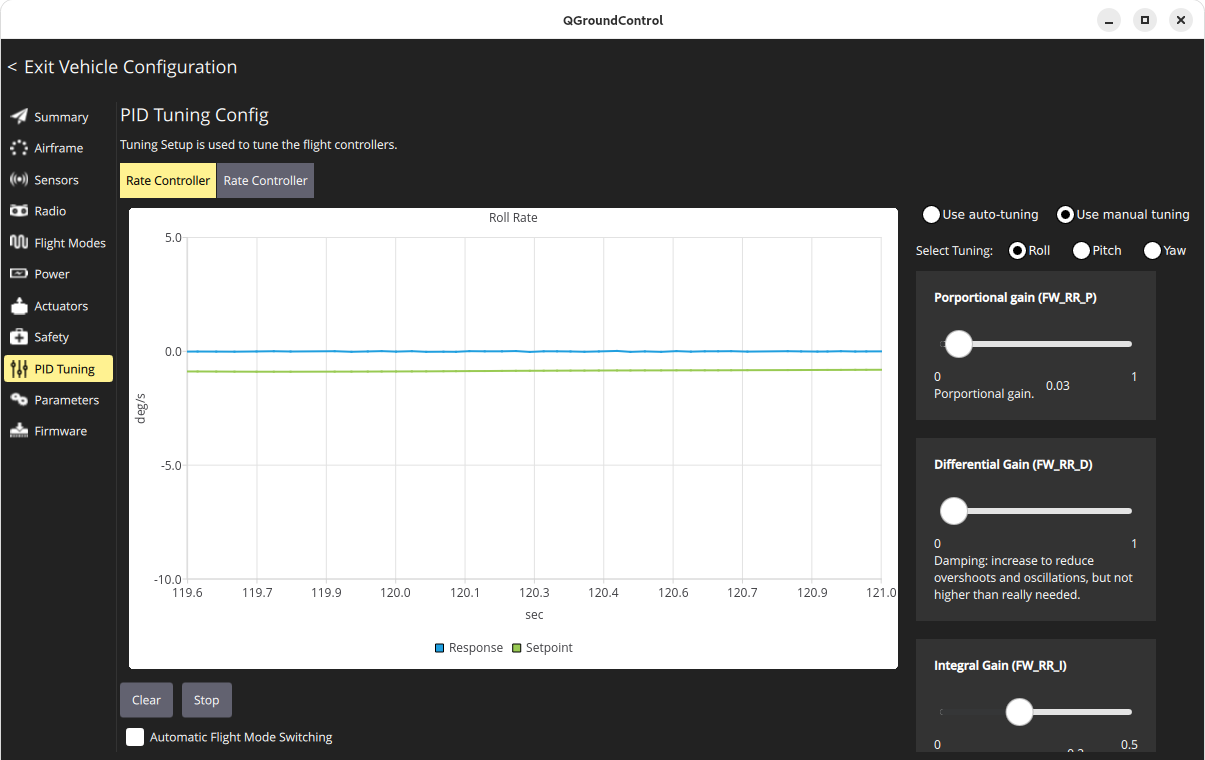
It’s definitely not as user friendly as the pure MC/FW vehicles, but I think once you transition to FW the plots show the fixed-wing rate and attitude setpoints/measurements (even though the tab says “multicopter”.
If you want to use autotune, I would recommend you engage it through RC (see docs)
Was there anything specifically that you were looking for regarding the fixed-wing tuning interface that the multicopter one has for the vtol vehicle?