I’m facing a problem while using odometry for the position of the drone…I’m using realsense d435i, jetson xavier nx, and pixhawk 2.4.8 with px4 firmware…I’m using a bridge VIO to provide odometry data to px4…how the issue I’m facing right now is that bridge is sending data to /mavros/odometry/out and then odometry out is sending those data to mavros and further those data get into /mavros/local_position/odom and pose…but the position data (X,y,z) from the VINS(odometry)is correct till /mavros/odometry/out(topic) for after that when I’m doing rostopic echo of /mavros/local_positon/odom and pose it is giving some random wrong values…I don’t know why because at /odometry/out topic values are very fine but after going to mavros node it gets wrong!! also, I changed all the parameters which is required for vision pose estimate like(EKF2_AID_MASK=24, EKF2_HGT_MODE=VISION and turned off the barometer)!!
Please help regarding the issue that why I’m getting that random wrong values.
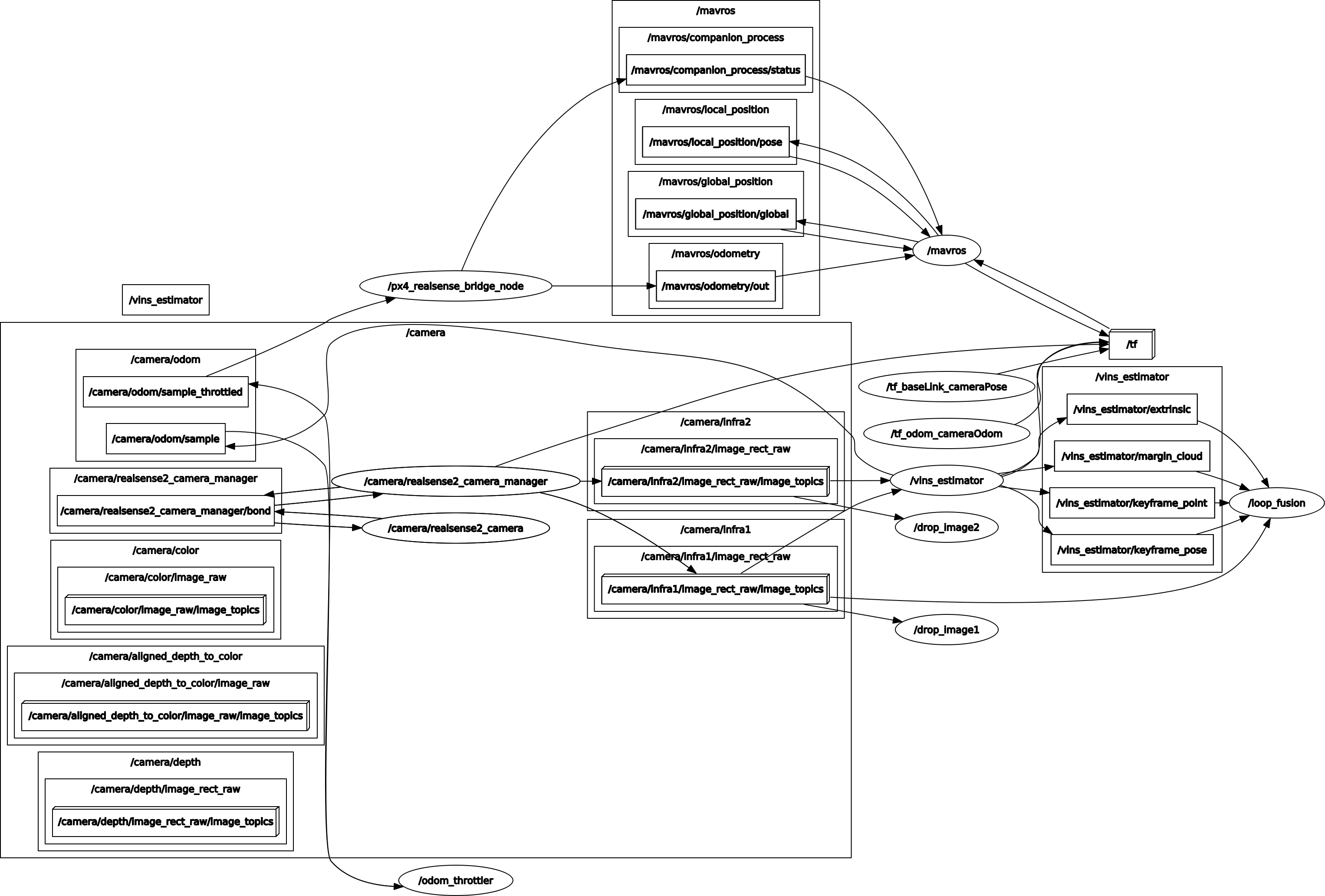
MY ROS GRAPH
MY TF_TREE
