Dear People.
I have the following hardware:
pixhawk mini
Jetsontx2
zed camera
and the following software
ROS kinetic
Ubuntu 16.04.1
Jetsonpack 3.2.1
ZED=SDK version 2.7
Mavros
mavlink
I am using mavros to interface the pixhawk to my ROS environment.
I am trying to read the following topics:
/mavros/global_position/global
/mavros/global_position/local ////////
/mavros/imu/data
/mavros/local_position/odom //////
/mavros/local_position/pose
/stereo/camera/rtabmap/odom
I also have drone.xacro model.
I have recorded some bagfiles and when I visualized them in RVIZ I can see the topics
/mavros/global_position/local
and
/mavros/local_position/odom
Totally shifted and rotated. This can be seen in the following figure:
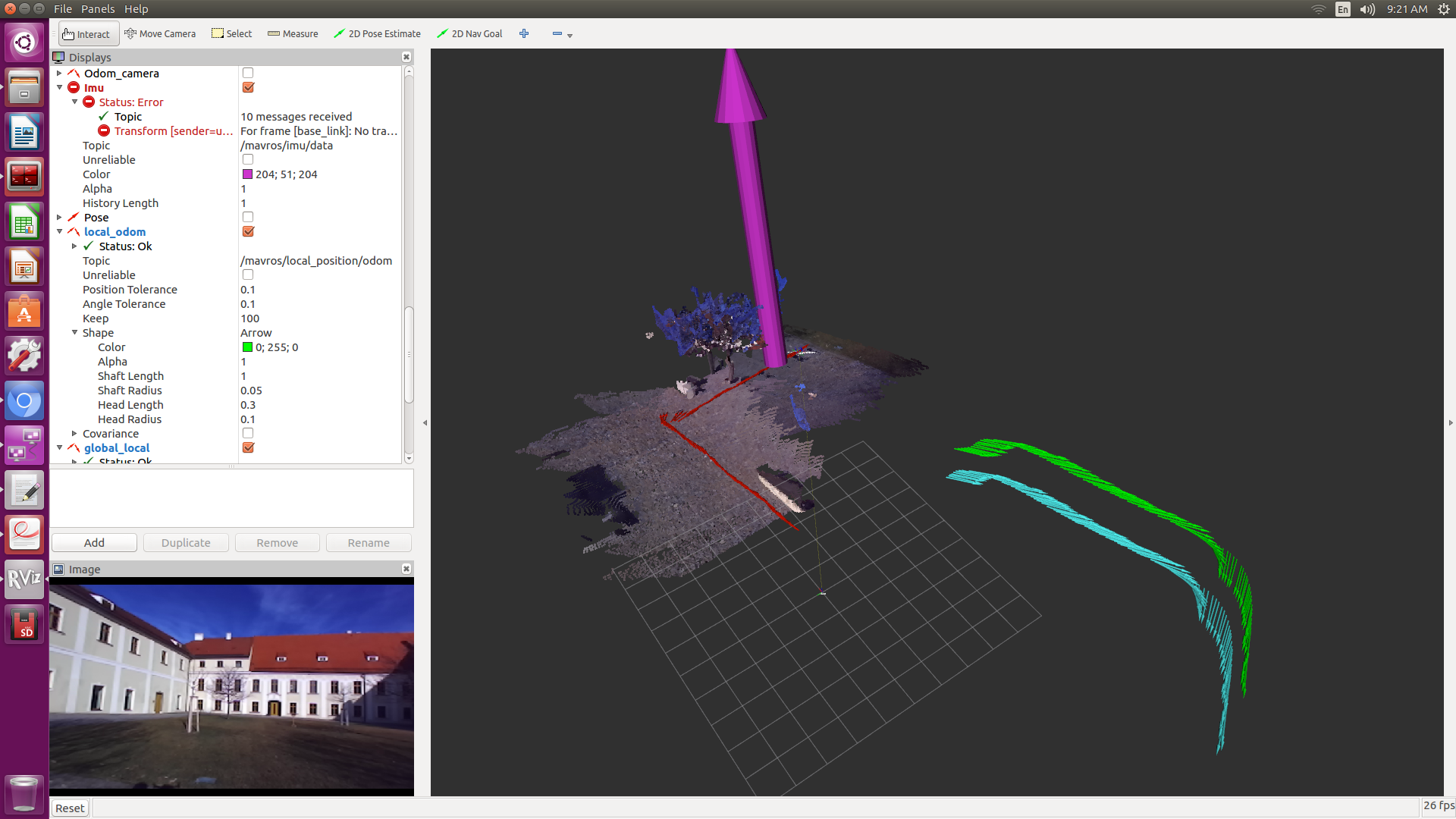
-
The red arrow set is the /stereo/camera/rtabmap/odom topic, in other words the odom calculated by rtabmap based on the stereo images.
-
The green arrow set is the /mavros/local_position/odom topic that is shifted and do not follow the drones position in RVIZ
-
The blue arrow set is the /mavros/global_position/loca topic that is shifted and do not follow the drones position in RVIZ
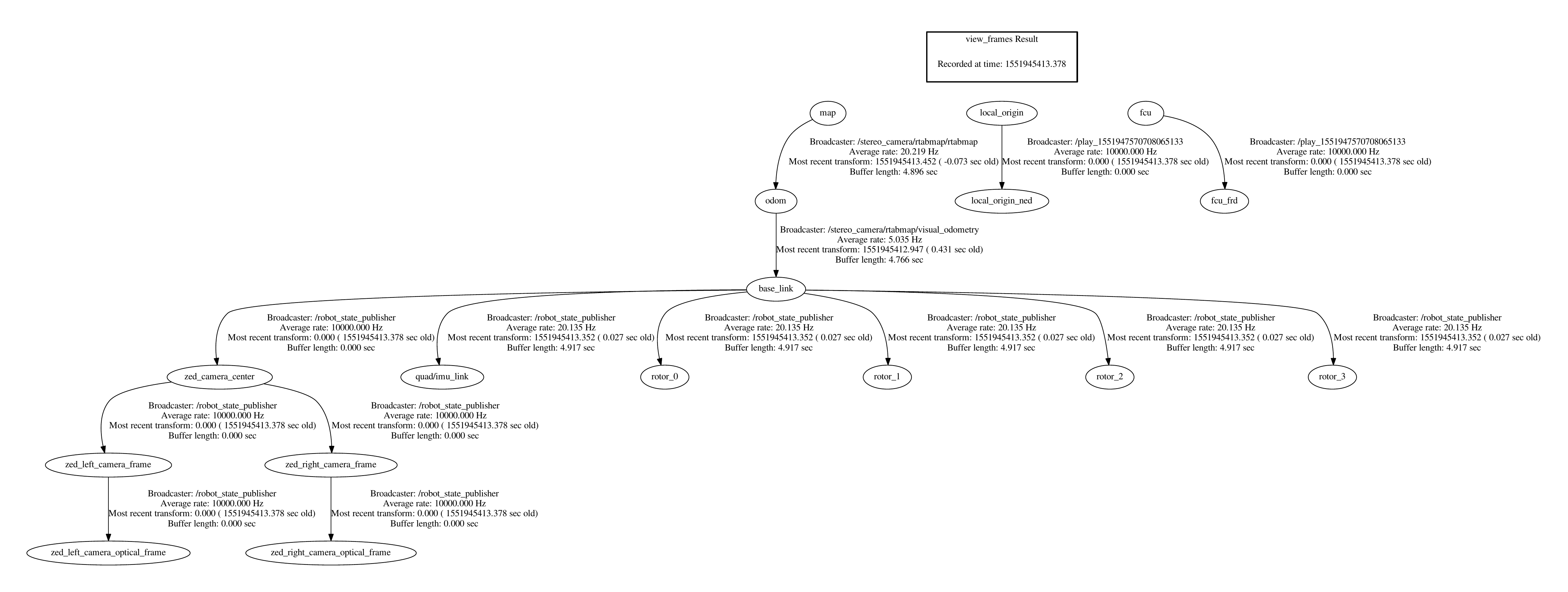
The tf tree is depicted in the next figure:
The way I am calling mavros is as follows:
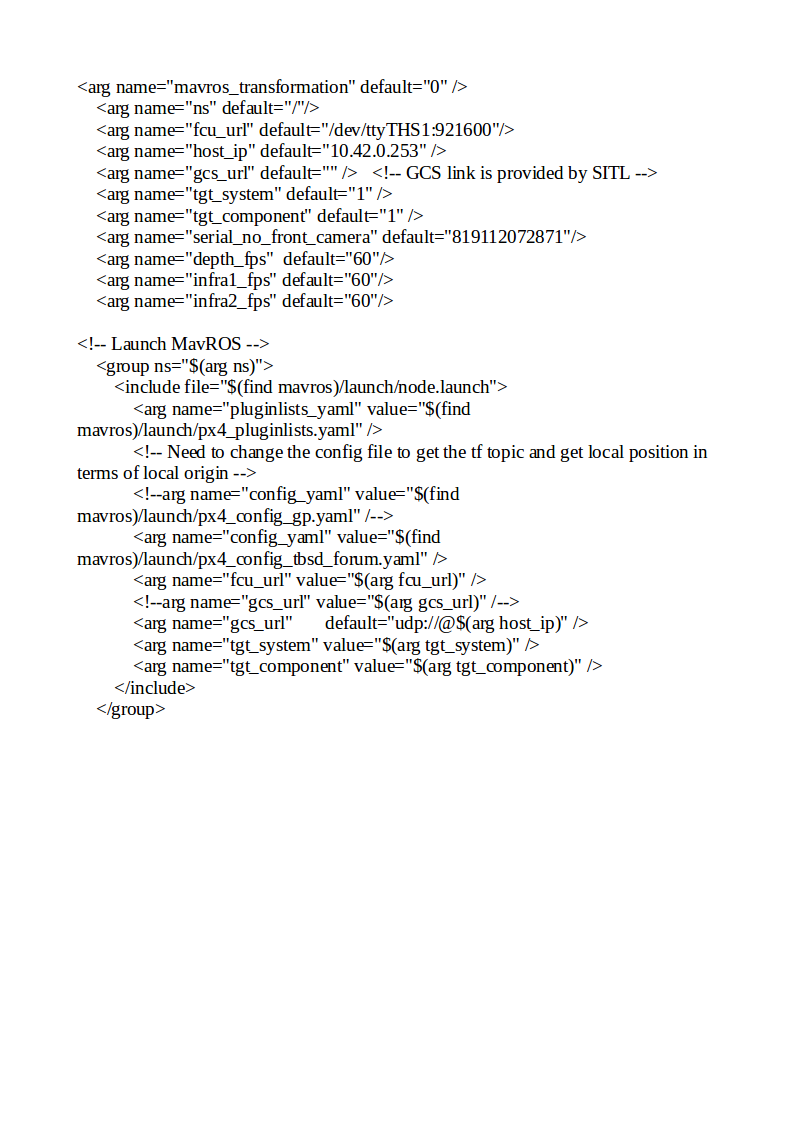
and the px4_config.yaml I am using according to a forum :
And also /mavros/imu/data topic is delay with respect to the base_link of the drone.
Can some one help me or suggest what is wrong???
Thank you so much.