I am working on a coaxial quad Drone production. For each drone, I set
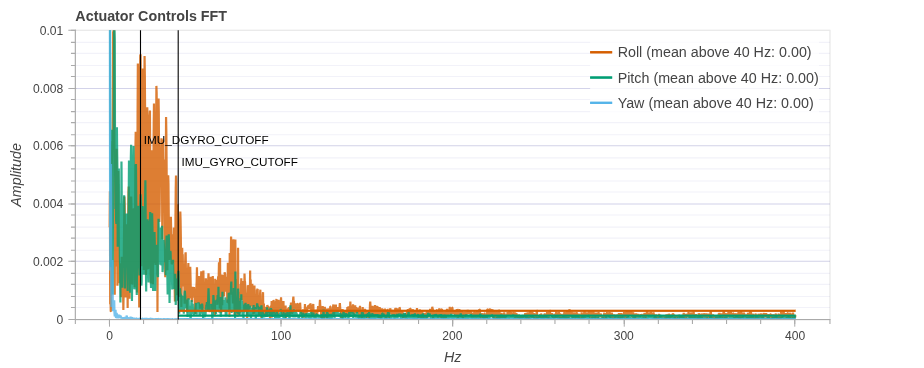
IMU_GYRO_CUTOFF and IMU_DGYRO_CUTOFF to filter out noise. I generally see noise at 50Hz. Here is an example

Every drone has dampper installted to reduce the noise. Now in few drones I see low frequency noise
0-40Hz. Everything is the same Frame, Motor, Prop, Esc and same dammpers is install as the others Drone. I try to use static notch filters to cutoff low frequencyIMU_GYRO_NF_FREQ = 25HzIMU_GYRO_NF_BW = 15HzI see minor stability, but it is unsatisfying. Here is the log
Stabalize_Flight
Altitude_Flight