I am building a coaxial drone. Here is my
Setup:
Airframe: Generic Octo coaxial geometry
Flight Controller: CUAV_X7PRO
PX4: v1.16.0rc
Motor: MAD-kv380
Propeller: 13X10
Battery: 12S
I am tuning the Gyro filter following the documentation MC Filter Tuning & Control Latency
I do some Position & stabilized Flights
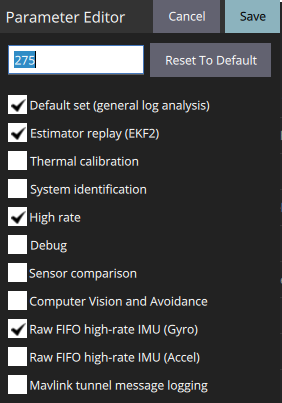
As I am recording a log at high data to get Raw FIFO high-rate IMU(Gyro)
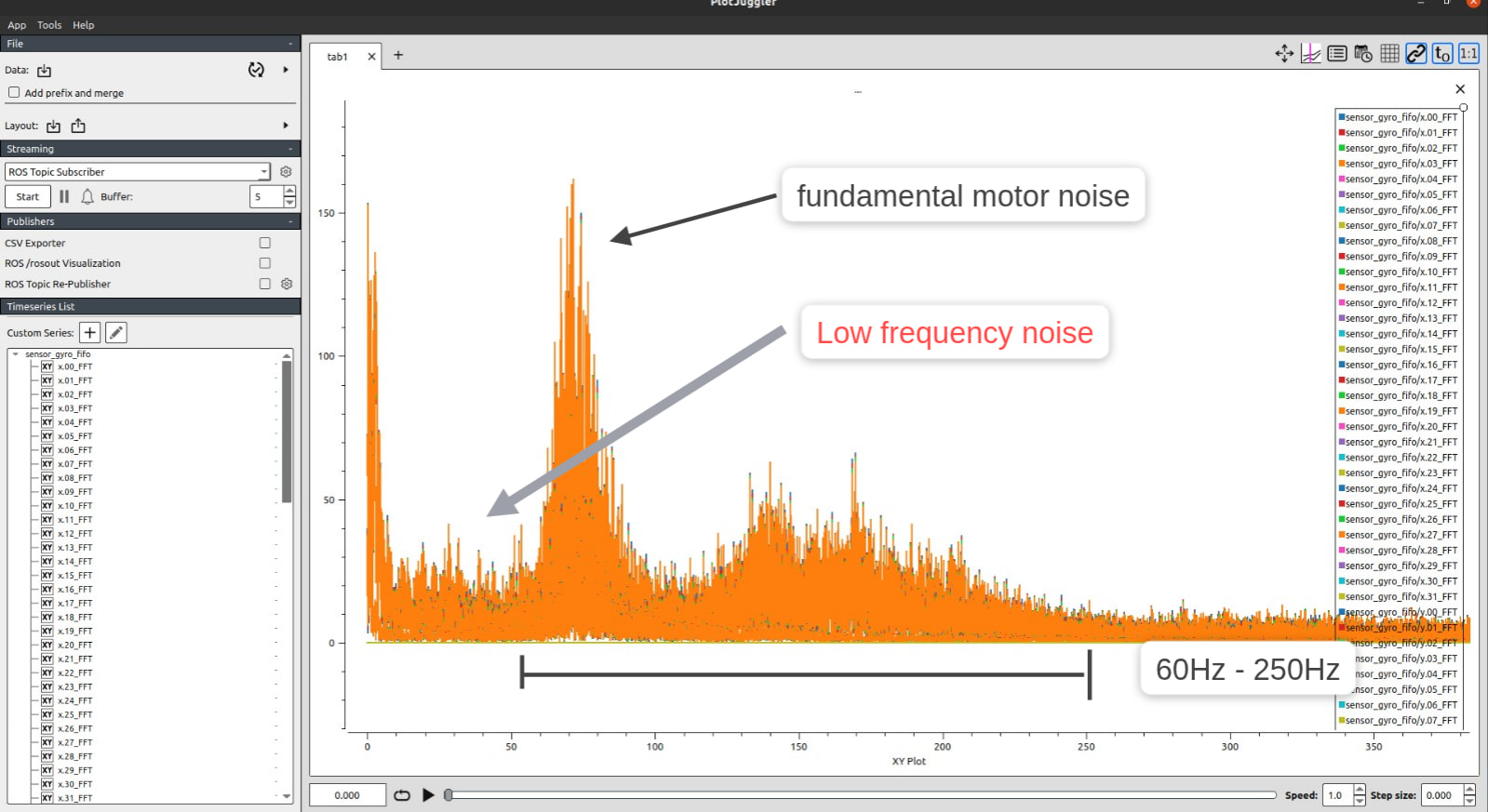
I do an FFT analysis using plotjuggler on sensor_gyro_fifo recorded in .ulg .
IMU_DGYRO_CUTOFF = 18 Hz
IMU_GYRO_CUTOFF = 38 Hz
IMU_GYRO_RATEMAX = 2000 Hz
As the motor is running at high RPM, taking advantage of high noise frequency, I can set IMU_GYRO_CUTOFF to Attenuat High freqency noise, but also below IMU_GYRO_CUTOFF & IMU_DGYRO_CUTOFF, I can see noise spikes in the range from 0-50Hz which is not filtered out.
I can not use Dynamic notch filtersas i dont have Dshot or ESC telemetry.
How can I perfectly tune it? I check IMU_GYRO_FFT_EN to enable onboard FFT, but I haven’t studied mathematics behind it.