Hi Guy
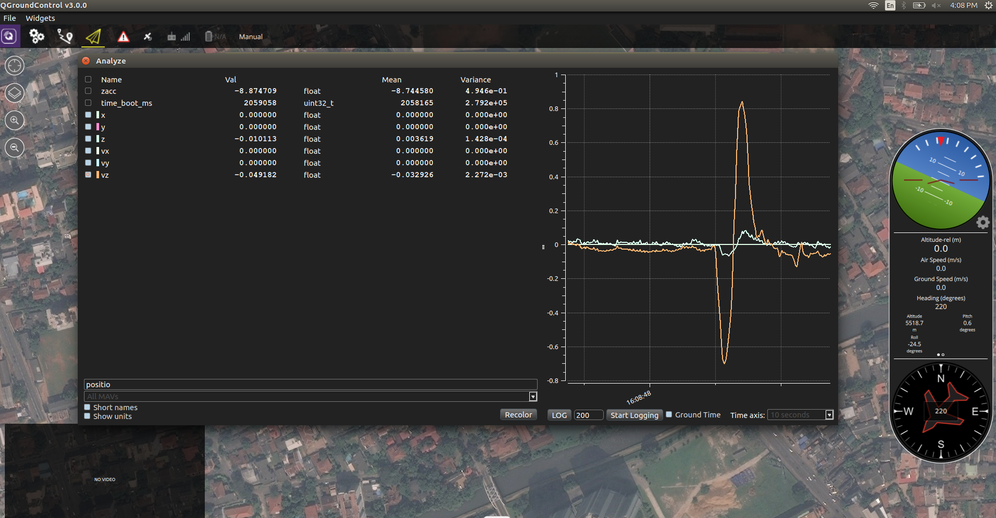
Can any one please tell me why in Mavlink Analyze, LOCAL_POSITION_NED, the X, Y ,VX and VY are showing 0 when I move the Pixhawk. The Z and the VZ is displaying data fine.
Really appreciate your advice on this.
Hi Guy
Can any one please tell me why in Mavlink Analyze, LOCAL_POSITION_NED, the X, Y ,VX and VY are showing 0 when I move the Pixhawk. The Z and the VZ is displaying data fine.
Really appreciate your advice on this.
You probably don’t have any horizontal position measurements (e.g. GPS or optical flow). Z can be measured with the barometer.
Hi Nicolas
Thanks for the reply!!
You are correct, I have taken the GPS off.
My need is to measure the distance using IMU acceleration and try to fly a small mission.
(HIGHRES_IMU.xacc , yacc and .zacc), they work fine without GPS. Is there any means of using this to find distance? A code or a double integration method. I know the readings off it will not be accurate but I want to try this out.
thanks!!
Something like that is not implemented I believe and for good reason. Integrating IMU values to get a position estimate is very inaccurate, especially on a flying vehicle. I do not recommend that at all.
If you need positioning without GPS, look at something like optical flow.