I want to get the gps NED velocity through NEMA Deal, but there are lattitude、longitude、altitude and time from GPS.
I know that the UBX Deal can do it , but I don’t get UBX Deal.
Does these parameter (vx, vy, vz) from GLOBAL_POSITION_INT is a velocity in GPS coordinate?, If yes, how to convert these value to NED coordinate and Is it accuracy better than velocity from HIGHRES_IMU (xacc, yacc, zacc)?.
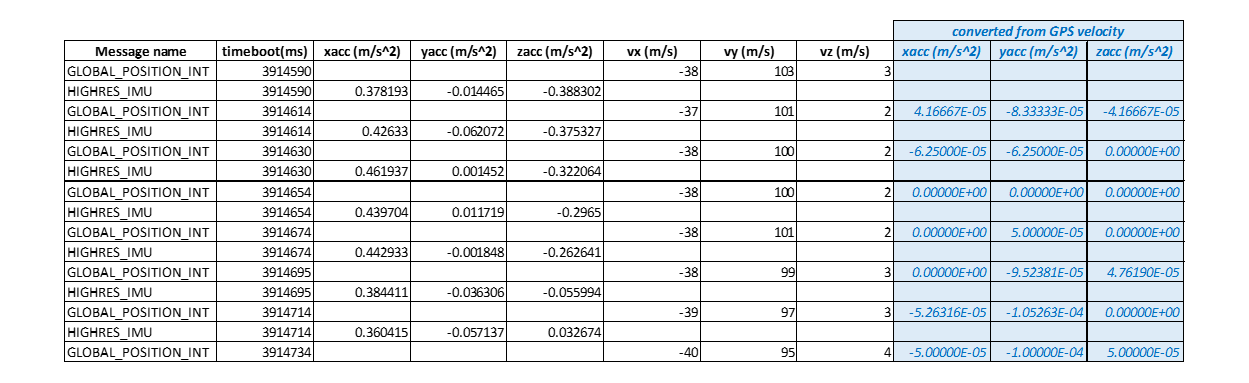
Thank you so much @Nicolas, I have tried to convert the velocity from GPS to acceleration using formula a = Δv / Δt, the result is totally different from HIGHRES_IMU acceleration. Am I using a wrong formula?
I am searching for the way to get the most accurate acceleration. Is there any possible solution to obtain acceleration which more accurate than HIGHRES_IMU message.
Both the IMU data and the discrete derivative of the velocity estimate will be quite noisy.
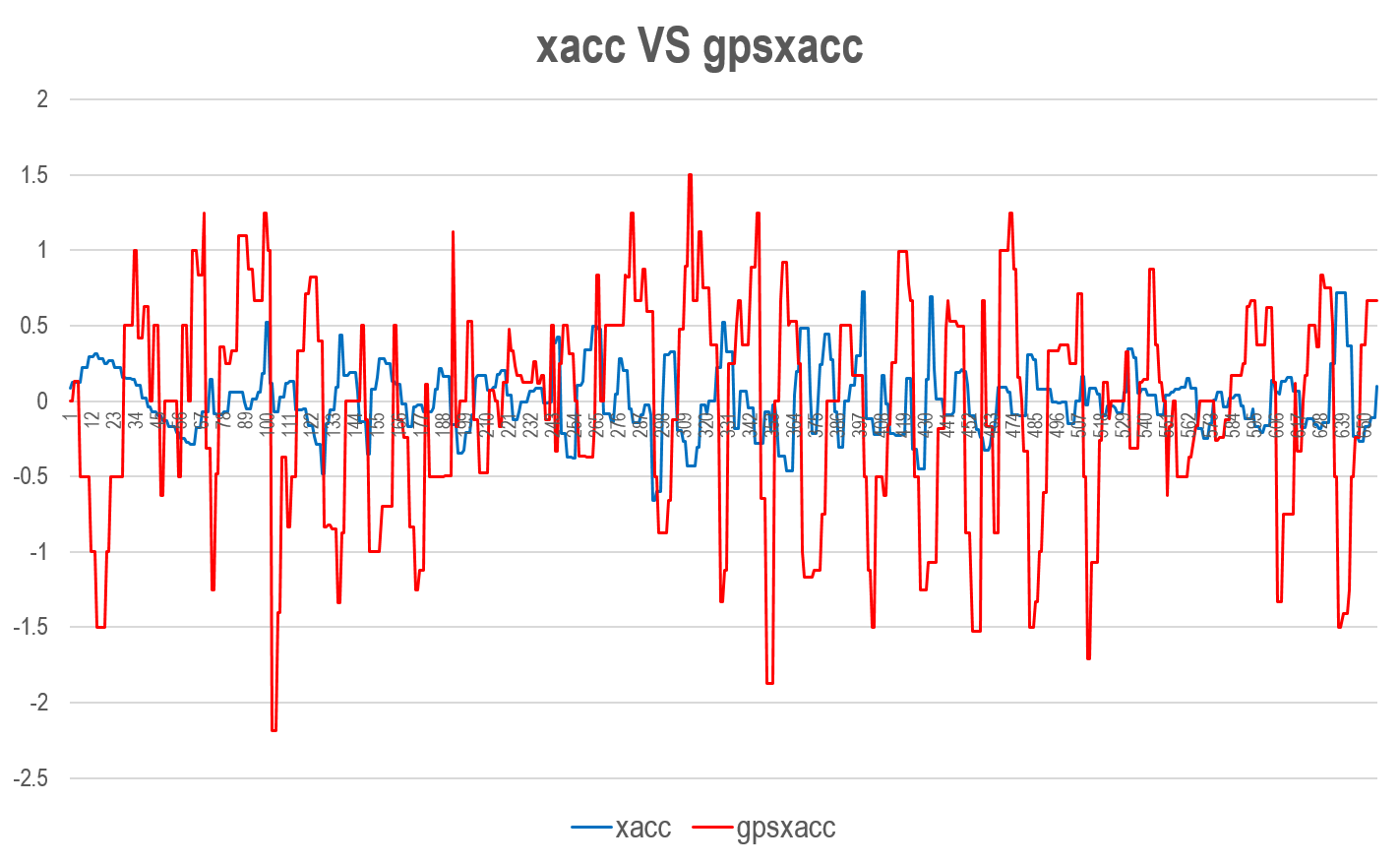
Have you tried plotting the results? I’m assuming you’re using more data than you showed here, I would use several hundred samples.
Does this dataset contain significant accelerations? If so, I would expect that you see the two correlate.
xacc is acceleration on x axis from HIGHRES_IMU message, and gpsxacc is acceleration converted from velocity(vx) from GLOBAL_POSITION_INT. In the graph, at some periods of time, the both data are contrast together. Is this because of noise? or is it relate to the coordination of both messages as I understand so far both are the same local NED. and Is there any possible solution for the discrete derivative of the velocity estimate with less noise than the simple one I’m using now.
Sorry for asking you so many questions, I’m not engineering, I still have some trouble to find and understand maths myself. Thank you for your kindly help.
You don’t have a lot of excitement in these signals. Are you moving the vehicle around significantly?
Also remember that the IMU data is in the body frame (X pointing forward of the vehicle) while the GPS data is in NED frame, i.e. your computed X values will point north.