I am using Pixhawk autopilot pro with QGC.
I want to get the X and Y position details from the IMU without using GPS.
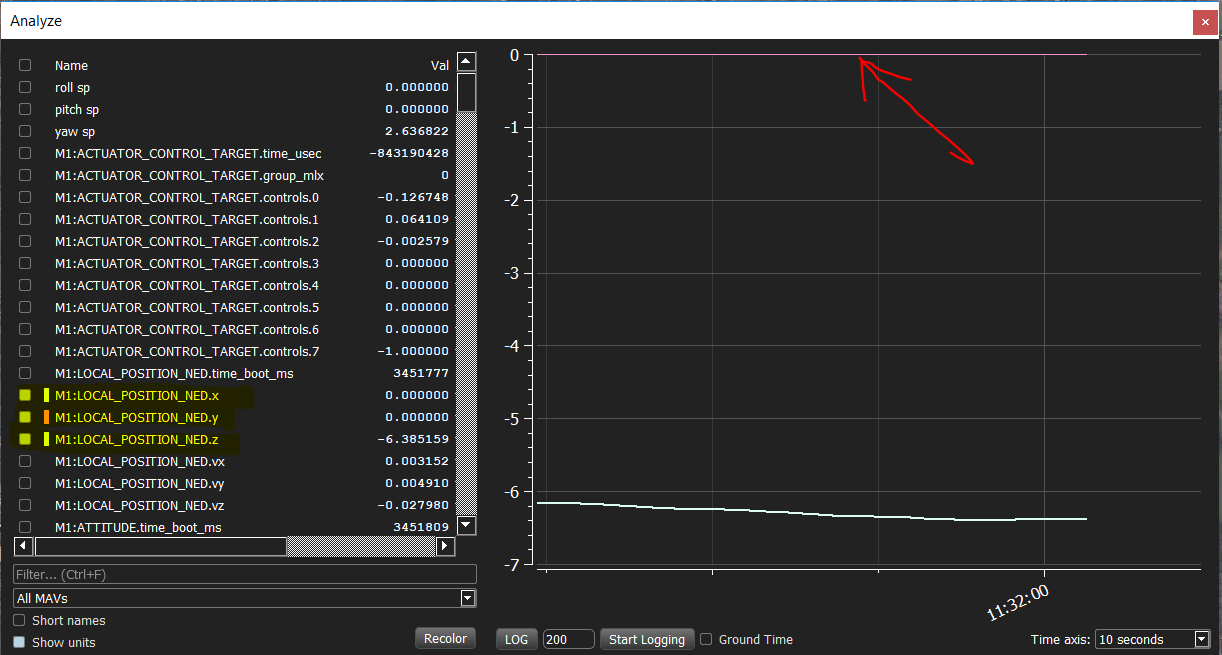
So I did the Arming and move the pixhawk in X and Y directions but in log details or from Analyze widget I cannot see any position change. So how can I get it done?
Is anyone know how to get the local position X and Y data using IMU (without GPS)?
Thanks for the information.
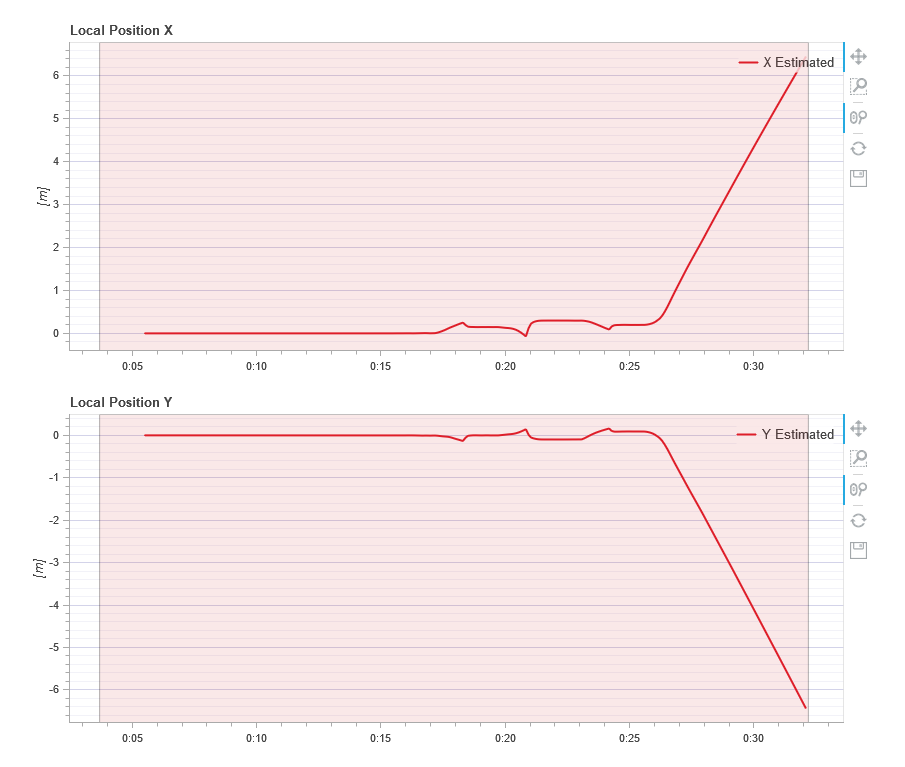
Anyway I have been able to get X and Y local position readings through LPE estimator (default is EKF2).
But they are not accurate enough for any useful thing to do.
The X and Y distances depends on the movement speed.
If moved fast the distance measured as long distance.
If you know any method to get the X and Y coordinates of local position by only using IMU, could you please inform me?
I have another question to ask from you.
When I using the EKF2 estimator the Pixhawk Pro internal IMU did not show any local position X and Y changes, only displayed the Z change due to barometer.
I cannot understand the reason for this.
What is the reason when getting local position is works for LPE and not works for EKF2?
Can anyone explain this to me?
[Note: I did not used any external GPS or any other distance sensor in this experiment. I only used internal IMU of the Pixhawk Pro]
Ok, so LPE estimates position. Now my question is this estimated position worth anything? Or does it just integrate accelerometer bias and is therefore completely off after some time? It’s a double integration from accerometer values to velocity to position, so small errors will add up and then be accumulated over time, so it’s completely unstable unless you fuse it with something like GPS or at least flow or VIO.