I had two consecutive flights with the identical approach waypoints.
First flight (All Normal): Log
Second flight: Log
PX4 Version: v1.11.2-Stable release (compiled by me to increase preflight airspeed limit from 4 to 20 m/s)
At the second flight,
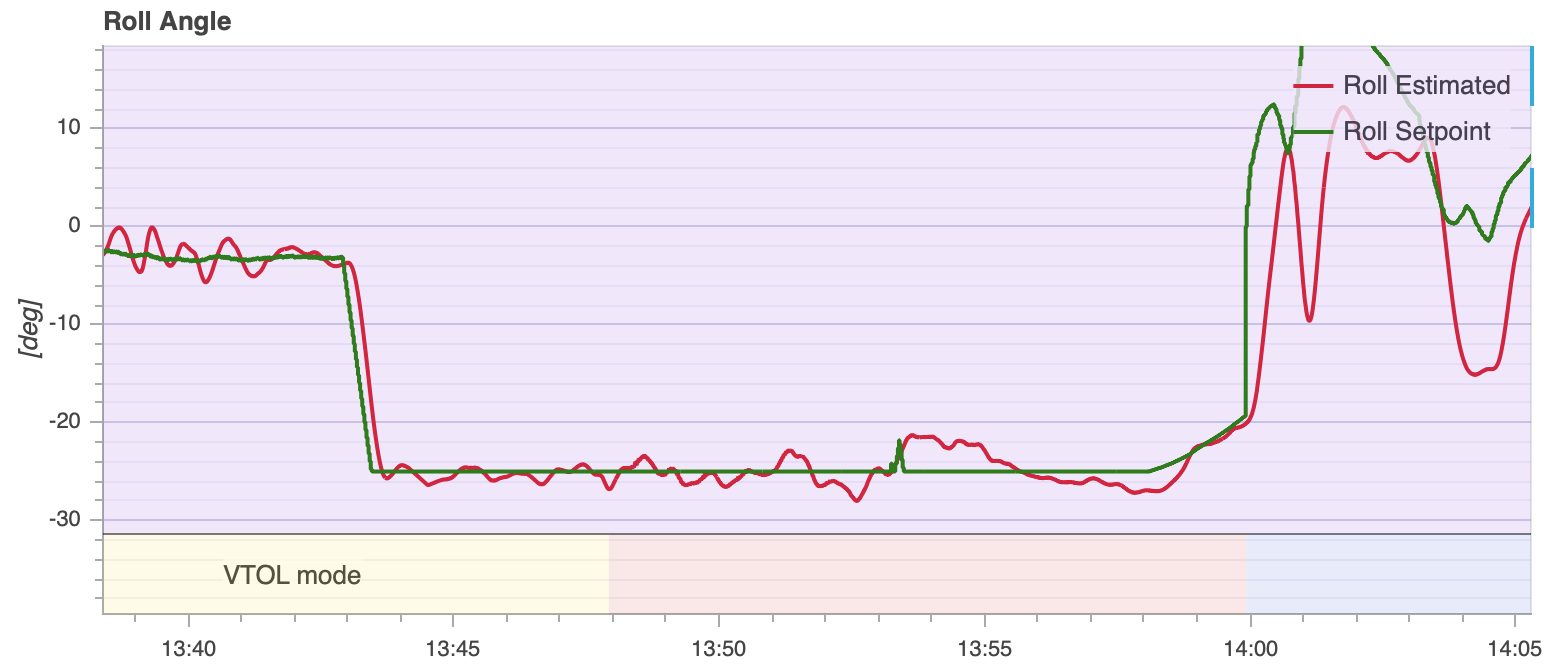
It didn’t do a back transition, and passed the landing point in fixed wing mode. Under which circumstances it does such behaviour?
Then it did a left turn. The back transition started during turning.
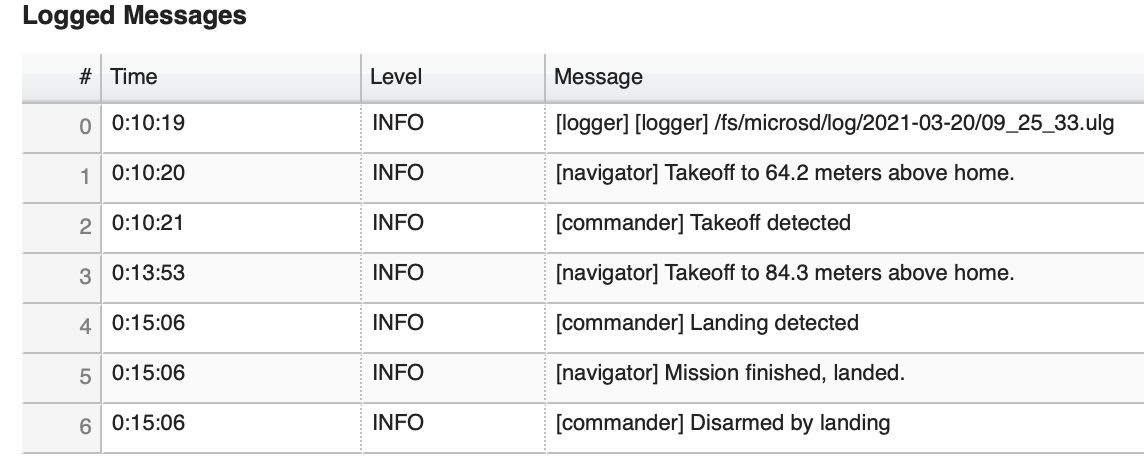
At the back transition, there is a navigator message saying that “Takeoff to 84.3 meters above home” although it already took off and started the back transition to multicopter mode. What might be the reason of that mystical navigator message at 0:13:53?
What type of landing point did you use? If it was a normal “Land” WP without a back transition item then it might be that it was NAV_FW_ALTL_RAD specifying the 5m altitude difference.
But even if that’s the case I would have expected the drone to try to start to spiral around the WP and not pass directly through it. Not sure what happened there.
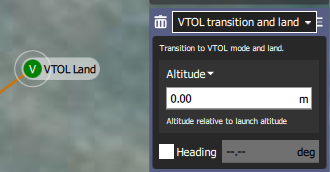
I use “VTOL Transition and Land” type WP. And you are right, it tends to do a spiral around the landing waypoint, and starts back transition once the altitude error is ~5m. My NAV_FW_ALTL_RAD is also 5m.