I’m having an issue when running missions on a rover using the Pixhawk 4. I set up a basic misssion with 4 waypoints, however when the mission starts all that happens is the rover turns to point directly at the first waypoint, then simply sits still. I think the issue is that it is trying to change its altitude to be at the same height as the next waypoint before moving to get there, however since it is a rover there is no way for it to change its altitude. Is there any way to circumvent this issue, or is it some other issue entirely? Any help is appreciated.
Thank you,
-JM
Can you upload a log to https://logs.px4.io please and paste the link here?
It says that I have an invalid file, not sure why. Could it be because it’s a .tlog file?
@Jacob_McCauley Is there any chance that you are running ardupilot and not px4?
I don’t think so, I made sure to install the PX4 firmware, the one that allows me to select airframes in the tab in QGroundControl.
The log file would be on the SD card in the flight controller.
Ah, so the telemetry logs won’t work?
We tend not to use them unless for the worst case where we don’t have the vehicle logs.
Ah, I see. Unfortunatley I can’t access the Pixhawk right now, and won’t be able to until I go back to work after new years. Do you have any suggestions without seeing the logs?
No, I don’t know. The only thing I can think of is that the acceptance radius of the items was too big and it reached all waypoints when it reached the first one.
That’s an interesting idea actually, how do I change the acceptance radius?
Hi, I’m upping this topic as I’m facing similar issues!
I’ve mounted my setup on a trolley and pushed it following the direction given.
Direction is working fine but I have no thrust until the vehicle reaches the end point, then it goes full speed.
Log : https://logs.px4.io/plot_app?log=94ef6fb1-22ae-4e79-95d1-1abdfb9c1f17
Thanks a lot!
Greg
I believe I managed to fix this issue by changing the altitude type in the missions to above terrain and setting that to 0. I have since switched to Ardurover firmware due to it being slightly more refined for use with rovers, however your use case may vary from mine.
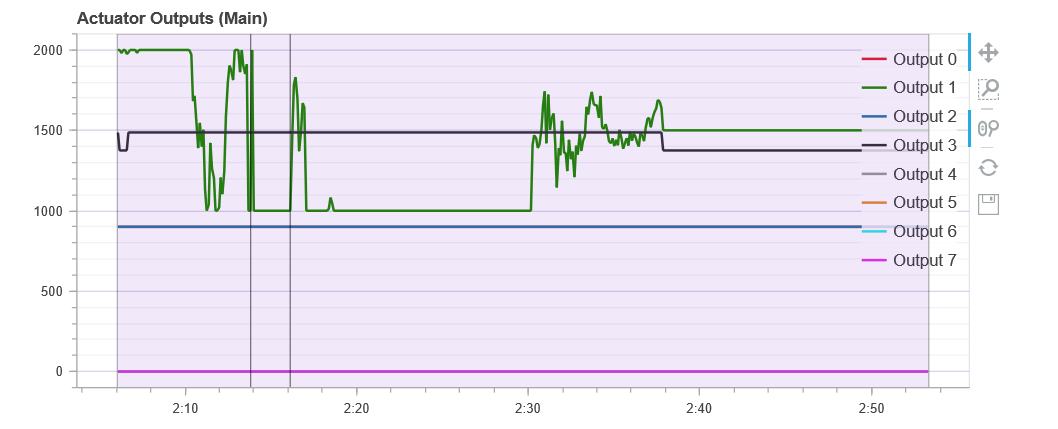
Thank you for your reply, it did not solve my problem, but I found out that my thrust PWM is constant
1500 and drop to 1400 at the end of the mission, explaining why it goes full reverse at the end of the mission !
Does anyone know a way to offset it, or to have it working ?
Thank you again !
Log : https://logs.px4.io/plot_app?log=cfa8ddb3-ce3a-4d83-98c7-5c55c012bd2a
It could be that your PWM values are improperly set. Do you know what PWM your motors can be controlled by? You can adjust the output PWM values in the parameters of the rover.
Hey Jacob,
I found a way to offset my thrust PWM, by setting PWM_MAIN_TRIM4 to 0.2 (if it can help anyone passing by).
It works like a charm !
Thank you so much for your precious help !
Final log : https://logs.px4.io/plot_app?log=649620a2-837a-4c4d-9bfc-d2457370cee9
No problem. Happy to help.