Hello,
I tested pixhawk with ‘position control mode’ today.
It worked fine when it took off. However, few seconds later, the multicopter turned around by itself.
I tried to operate RC in order to make it stable, but failed. It seemed to be lost control, and then falled on a tree.
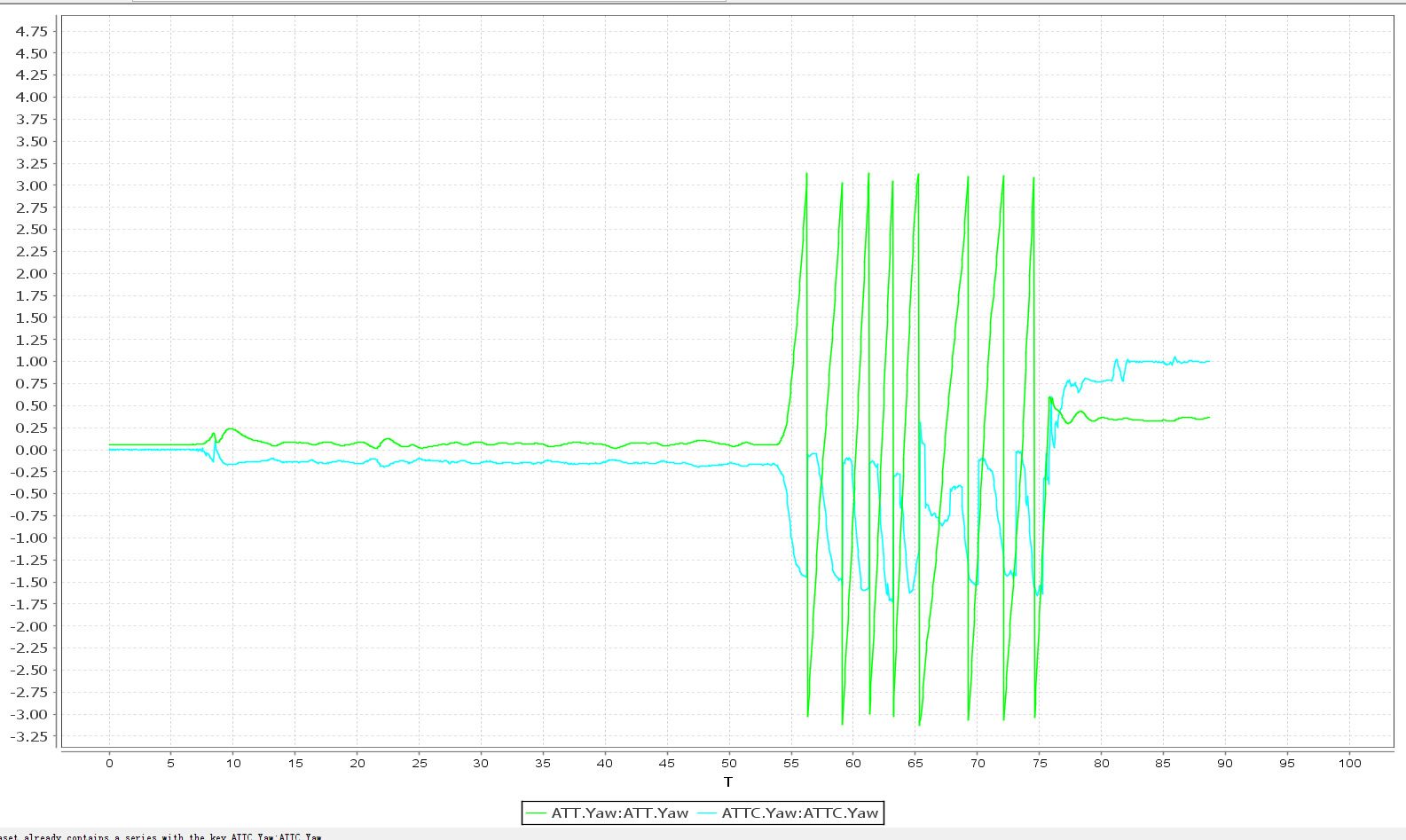
I checked the flight log, and just found ATT.Yaw abnormal.
Does anyone know the possible reason? Please tell me.
Flight log: