Hi !
I’m trying to add optical flow sensor to my drone, but I don’t want to risk a crash so I tested the new sensor by manualy moving the drone around (without prop) and recording flight data:
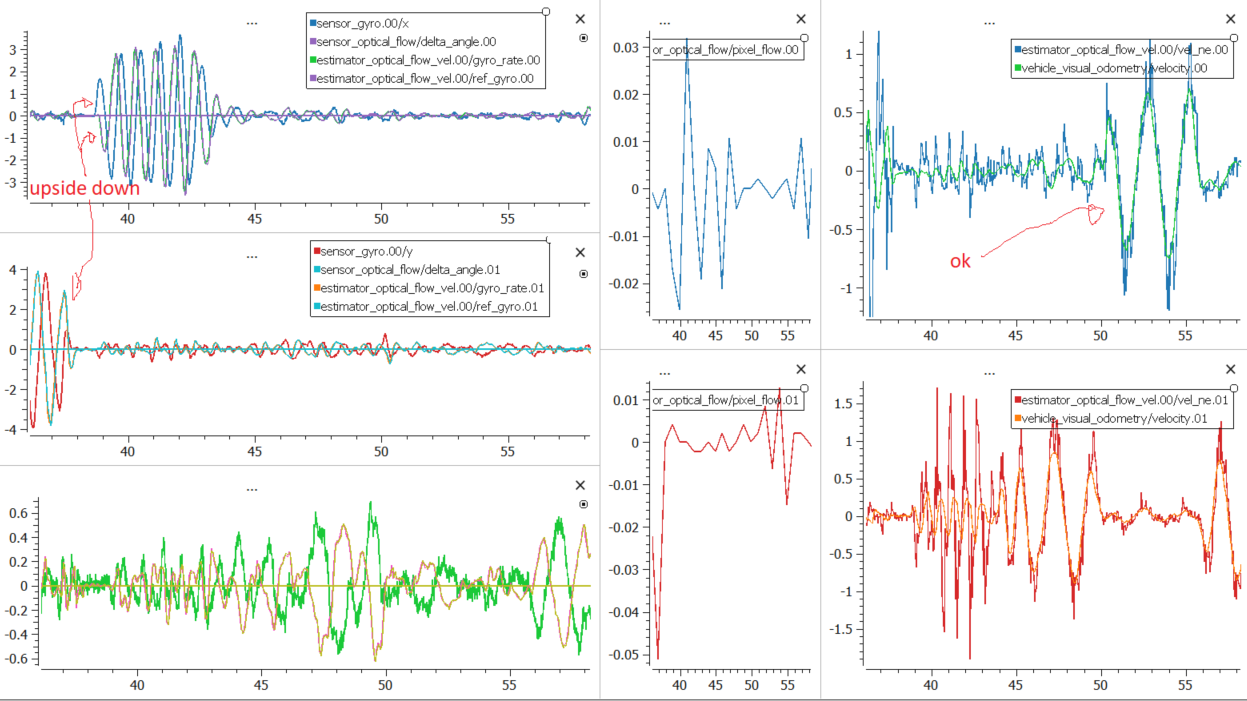
I have this situation where estimator_optical_flow_vel velocity seems right, but gyro_rate is upside down.
Is this expected and safe to fly ?
best