I am currently working with a PX4FLOW and and Pixhawk.
Until now, I didn’t get any value of Flow_x and Flow_y, but after trying absolutely everything it finally started showing. The problem now is that, even though it gives values back, the drone doesn’t correct the orientation like an Optical Flow should do (if it turns to the right it should correct to the left).
Does anyone know why would this happen? Is there a parameter I need to set?
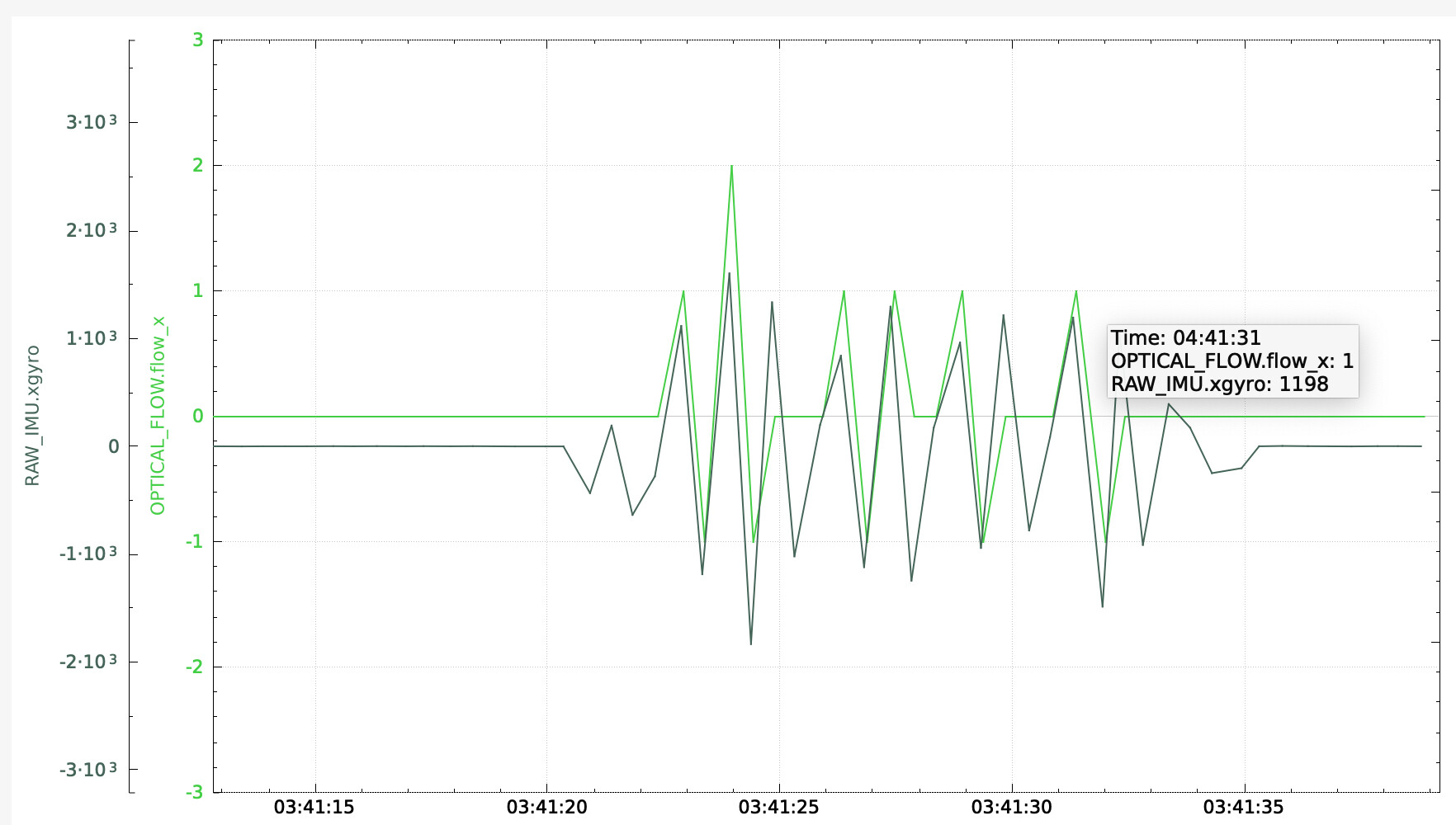
Also I realized Flow_x and Flow_y gives integer values (1,-1,2,-2,…), but when connected directly to the usb, the range of values is much wider. Is there an explanation for this?
Let’s see, I work with Ardupilot and PX4FLOW, I installed Mission Planner 1.3.39, when selecting the tab of PX4FLOW in Initial Setup, the camera opened, I focused it. Then I followed the tutorial of Ardupilot, making short turns of ±15º in Roll and Pitch, downloading the logs, plotting them and adjusting FLOW_ORIENT_YAW, FLOW_FXSCALER and FLOW_FYSCALER.
At last I saw that it wasn’t only the Optical Flow but also the Throttle parameters MOT_SPIN_ARM and MOT_SPIN_MIN (Setting Motor Range — Copter documentation), that made the dron uncompensated.
baaed on the optical flow , that is, on the motion of point features in the field of view. rotation, so the key problem of separating the effects of rotation from those of translation is solved image deformations and derive an equation that links them to the direction of heading. an important point for finding the correct solution.
optical flow computation as a learning problem [21]. While these approaches intend to corrects their direction towards the true direction of motion of the object.