Hi dear all,
Thank you for taking time reading this.
I’m working on the PX4Flow optical flow sensor recently and get quite confused on the gyro compensation part which I wish you guys could give me a hand.
I’m using the firmware here: https://github.com/PX4/Flow and I’ve read from another thread said the gyro compensation is now disabled by default on the px4flow firmware and this part is doing on autopilot . However after I gathered the OPTICAL_FLOW_RAD message and plot out the integrated_x/y value, they seems surprisingly good to me. I’ve uploaded a figure to show this clearly: 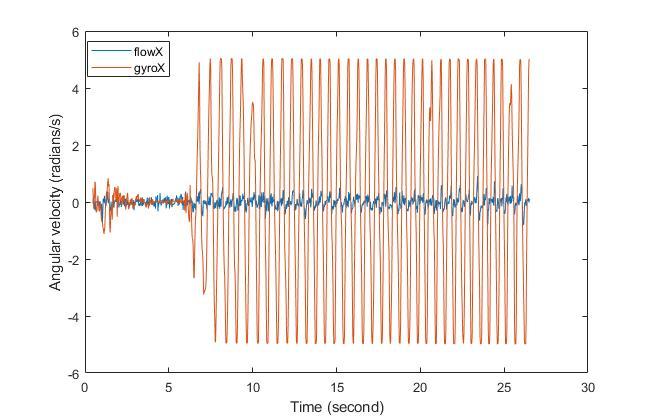
I did this test by rolling the px4flow around its lens and you can find that the flow value is quite stable compare to the gyro value. I also check the BFLOW_GYRO_COM and it is the 0 which means the gyro compensation is off. So my question is if the flow value compensated or not? If not, is it normal that the flow value has such a huge difference with the gyro value?
Thanks a lot for your help.
regards,