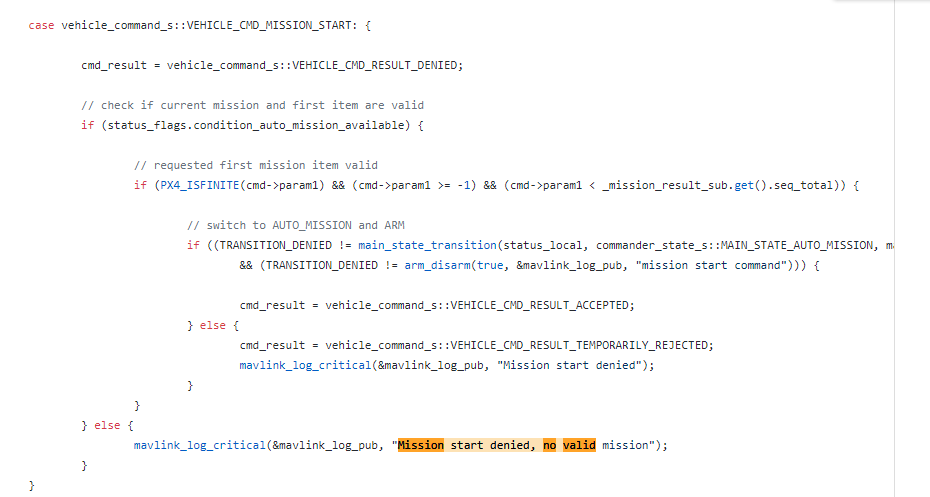
Hello everyone! I use px4 for tractor. (see video ). I developed a driver for steering wheel. But i have a lot of problem. First of all, want to start mission from QGC. But… px4 have this code
It’s very safe. From the other hand, I do not fly and I will not crash. How can I disable it? Just leave switch to AUTO_MISSION and ARM? It my first question. Now I go to test my pixhawk, which located in the frost. And I’ll bring you some ekf errors in next post.
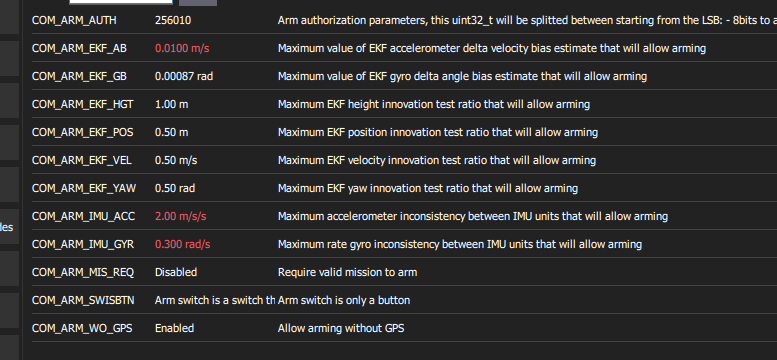
Well, second problem . Can I solve it without code? I tried changing settings of commander.
When I can get reason of this situation? Logs are written after arm, but I can’t arm!
Normal temperature (video)
(I use pixhawk 2.4.8). On friday i try to change it on pixhawk original but sensors don’t differ.
svpcom
January 18, 2018, 8:02am
3
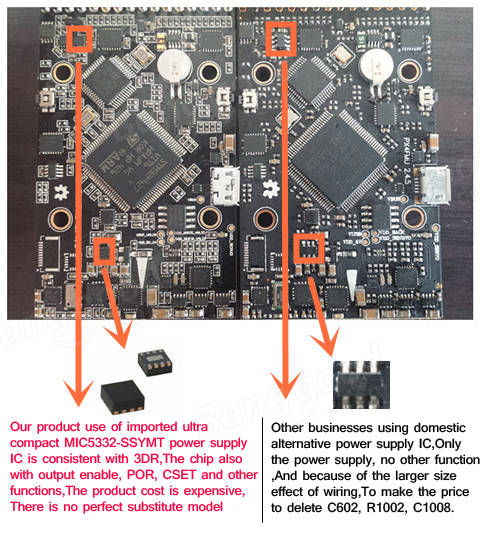
Have you calibrate your accels and gyros? Pixhawk 2.4.8 is an low-quality copy of official v2.4.6 with many “enhancements” to reduce its cost. See for details: http://diydrones.com/forum/topics/solution-proposal-for-pixhawk-imu2-related-bad-accell-health
Yes!
I go to test this on the original pixhawk.
To all:
OK, I checked two pixhawk. Today it work well. But it is an exception. How can I log this events in future?
svpcom
January 18, 2018, 12:18pm
6
Publish your logs from SD-card to https://logs.px4.io/ and post link here
First example . (with start mission)https://logs.px4.io/plot_app?log=d72ea072-703a-46cc-9264-c7d81fa02b9f )
svpcom
January 18, 2018, 1:02pm
8
Vibration is very high. You need to damp it.
svpcom
January 18, 2018, 1:12pm
9
Your voltage is 13V, but you set 7 Cell bat in params. It’ll prevent vehicle arming
In my view, you are wrong, because this error show very rarely, if I connect to pixhawk on usb (When it work from vehicle power)
It always work fine (example on video in first post) when the temperature is greater than zero ±.
svpcom
January 18, 2018, 6:05pm
11
svpcom
January 18, 2018, 11:03pm
12
Also set SDLOG_MODE to 2 to enable logging from boot until shutdown
svpcom
January 18, 2018, 11:06pm
13
You set CBRK_SUPPLY_CHK, so this check is disabled

{kind=link}