What could be the reason for a quadcopter, CW motors always spin harder than CCW motor during a position flight?
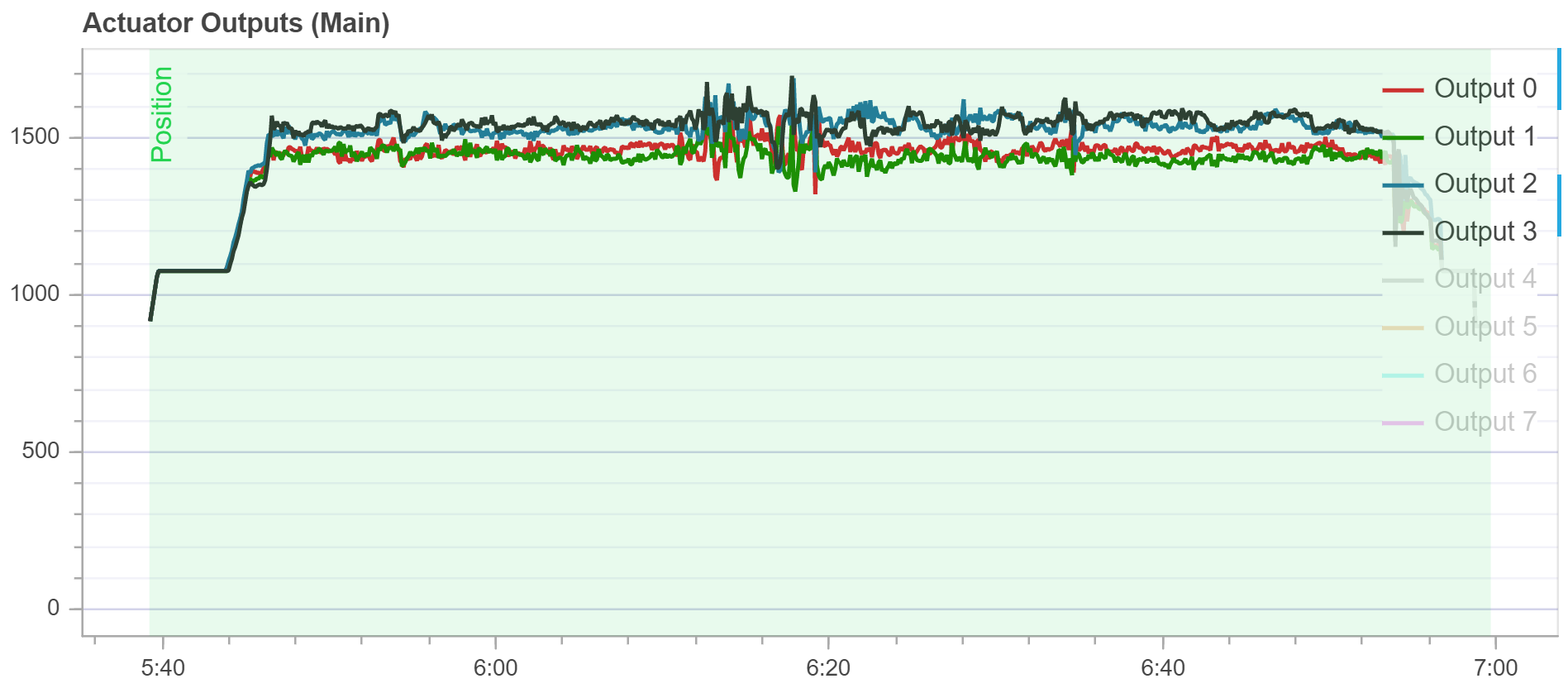
A recent build of my drone shows the CW motors get very hot after 2 min flight, much hotter than CCW motors. After review the flight log: https://review.px4.io/plot_app?log=d16ee715-30db-4276-8a11-a95255f015be, I found that Actuator 0 and 1 have less output than 2 and 3. Visual checking didn’t find any abnormal on the arm/motors/blades. What could be the cause?
This is due to a misalignment of the rotors; the drone is basically always fighting against a yaw torque.
Instead of trying to align them perfectly, a better approach is to tilt them in the direction where increasing the motor RPM will not only create yaw torque by the propeller drag but also by the thrust of the rotor.
For example, in a standard quad X configuration, the front-right motor turns CCW. When increasing its RPM, more CW yaw torque is produced by the propeller drag. By slightly tilting the rotor (~3 degrees are enough) towards the rear-right direction of the drone, even more CW torque is generated by the thrust of this rotor.
The yaw torque produced by a tilted motor is usually much stronger than the one produced by the propeller drag so as long as you have them tilted in the correct direction, you shouldn’t get that a large difference in motor RPM anymore.