I am a Windows10 user and have set up an WSL2(Ubuntu-20.04) environment for Gazebo simulation.
https://docs.qgroundcontrol.com/master/en/getting_started/download_and_install.html
I followed this guide and downloaded QGC for Windows and QGC for Linux. current stable 4.2.3 (In my case, I had to add one more line to the four-line command to run before installing the QGC for Linux. issue QGC#10306 )
I followed the order of this guide
I ran PX4 on SITL & Gazebo to automatically connect with QGC and saw multi-vechicle simulation work normally like in the introduction video.
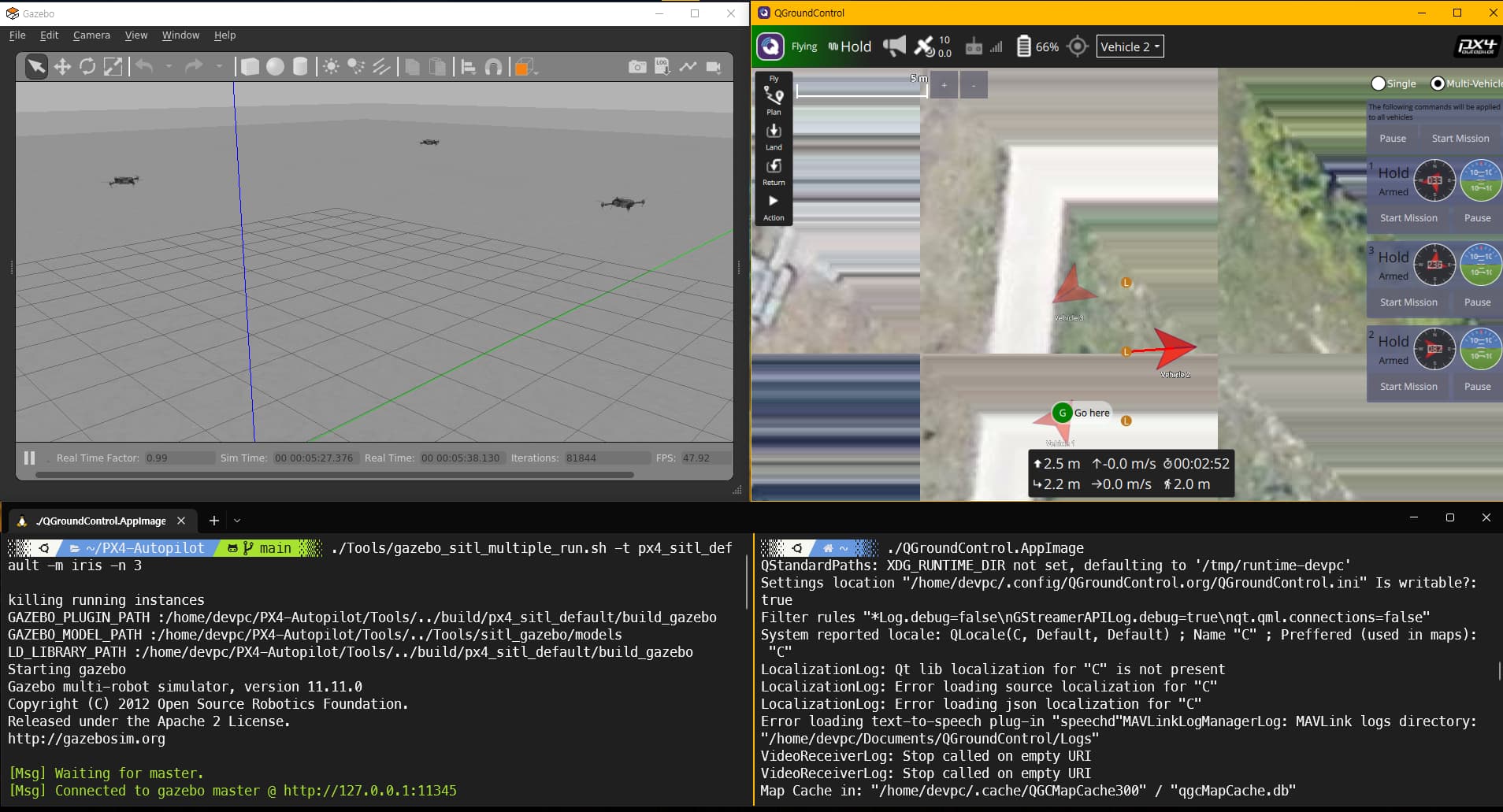
Figure 1: QGC for Linux dose connected with all vehicles and control all of them
( QGC issue#10350 In my case, I have a problem with the map of QGC being broken, but I still don’t know the cause and solution. )
This time, I tried multi-vehicle simulation with QGC for Windows.
Following the instructions in the ‘QGroundControl on Windows’ section of this guide, I manually connected to UDP port 18570 on PX4 on SITL.
Unlike QGC for Linux, it does not seem to be connected to all vehicles, but to only one.
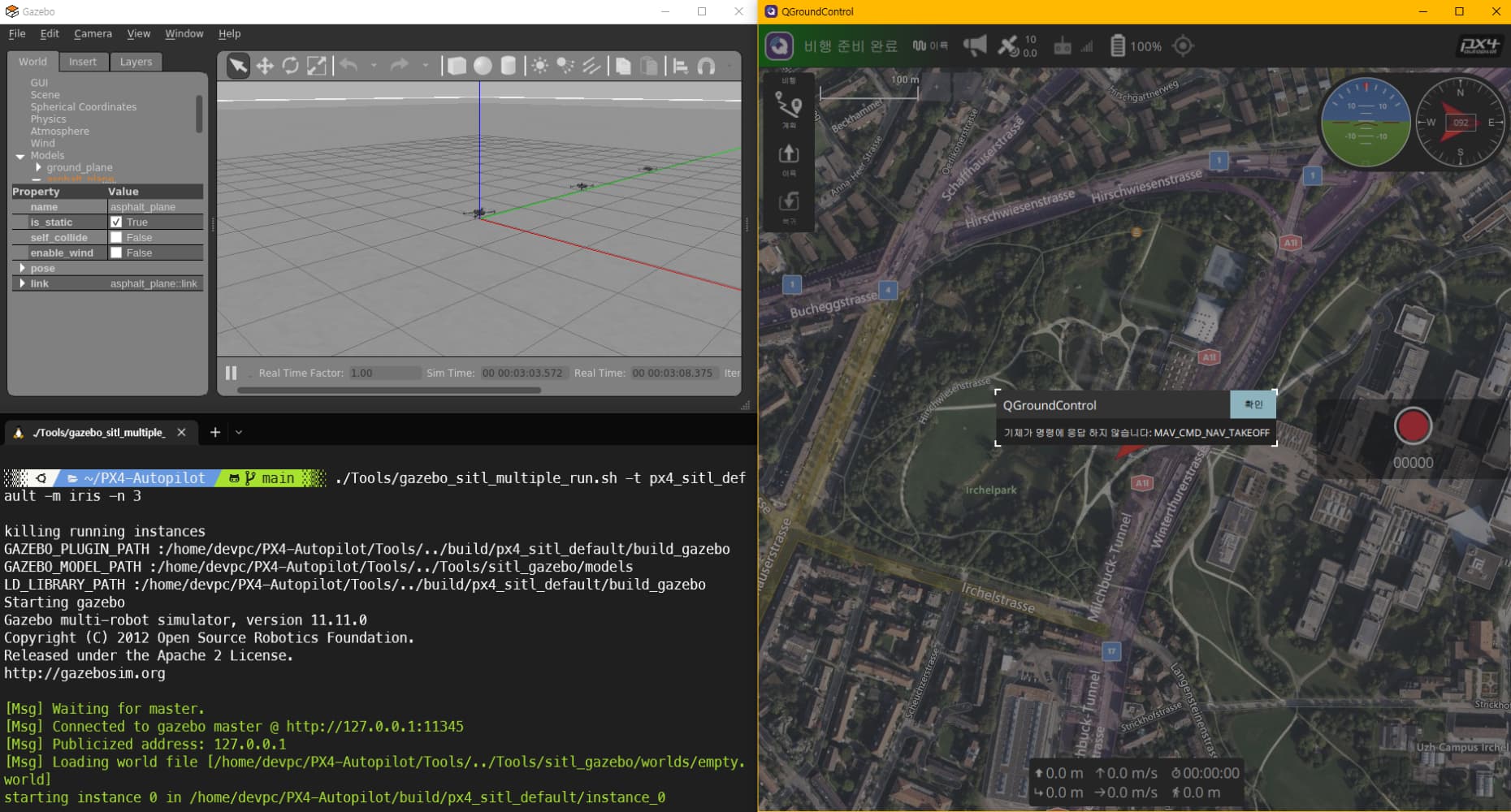
Figure 2: QGC for Windows dose not connected with all vehicles but only one vehicle
( In this case, unlike the QGC for Linux, the screen does not break, but there is another QGC issue#? that control commands by QGC such as takeoff do not run properly.)
Except for the two issues that I have seen in the above(broken map, out of control)
I am more curious about the contents below.
- Does QGC for Windows not have multi-vehicle control?
- If QGC for Windows also has multi-vehicle connectivity and control, how can I connect to all the vehicles?