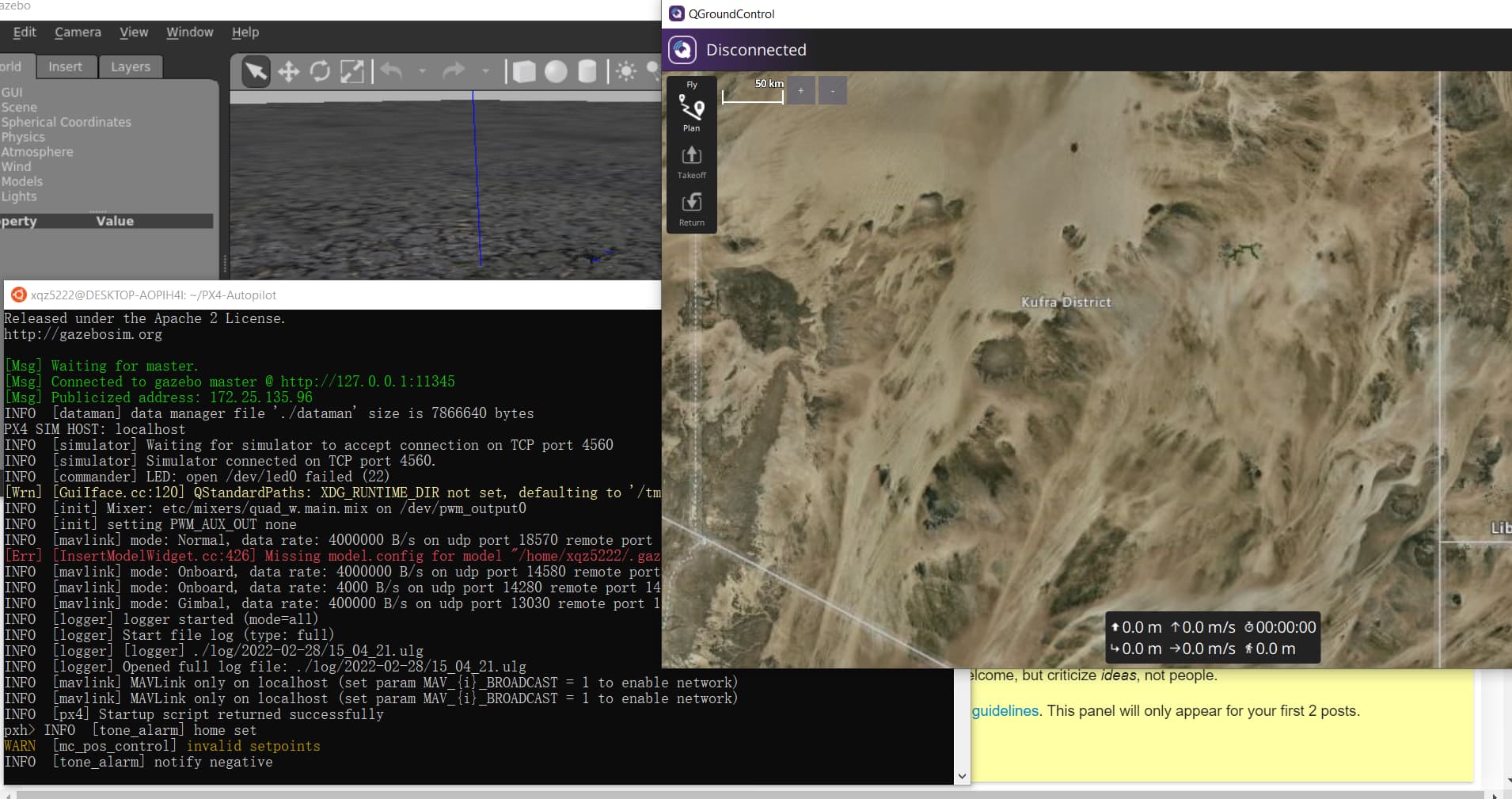
I started Gazebo simulation through this link Gazebo Simulation | PX4 User Guide. My ROS and PX4 are installed on Windows Subsystem for Linux. The QGControl Windows version is installed on the same computer. How should I make QGControl connect to gazebo simulation?
Thank you!
just launch QGC. It auto connects to the SITL.
I think it’s some kind of an error with QGC. Did you try reinstalling it??
If you have reinstalled it, try running ubuntu.sh bash file again from PX4-Autopilot.
Thank you! Running ubuntu.sh bash file from PX4-Autopilot, is it same with ruing make px4_sitl gazebo command as instructed in the website?
https://docs.px4.io/master/en/simulation/gazebo.html

run ubuntu.sh to rebuild your entire dependency chain. that could help solve your issue. It did help me a lot of times.
after installing, make sure all of your ros WS are sourced correctly (i.e., if you have ROS installed)
and then
cd path/to/PX4-Autopilot
make px4_sitl_default gazebo
In my case, following the instructions in the ‘QGroundControl on Windows’ section of this guide, I could connect manually.
Unlike QGC for Linux, it does not seem to be connected automatically.
Thank You! I have been almost knocking my head against the desk trying to get this to work. You’re a star.