How can I resolve the “Arming denied: resolve system health failures first” error when using SITL with OFFBOARD control to operate the drone? I tun SITL ( px4_sitl gz_x500), ros2.


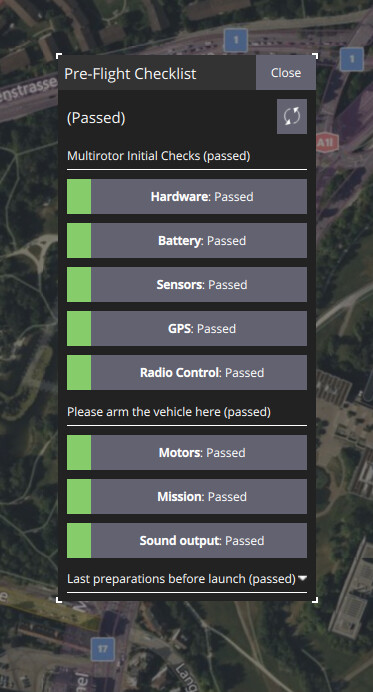
If you click on the flight mode name (with red background) you’ll see a list of issues denying you from arming.
In SITL it might be manual control input (RC or Joystick) not being set up for example.
Thank you for answer. I saw that. It was actually a problem with my code. I also downloaded the latest version of qground control. I rewrote the code based on px4_ros_com/src/examples/offboard_py/offboard_control.py at 86e9aeb20e55a4673fa8a9f1c29ea06a6c5ad1af · PX4/px4_ros_com · GitHub and it worked