Hi All,
Good Day.
I’m using pixhawk with px4 flight stack, I want to control the drone using telemetry module.
Please suggest how can i use virtual joystick using telemetry module instead of RC channels.
Thank You,
Ayush
Hi All,
Good Day.
I’m using pixhawk with px4 flight stack, I want to control the drone using telemetry module.
Please suggest how can i use virtual joystick using telemetry module instead of RC channels.
Thank You,
Ayush
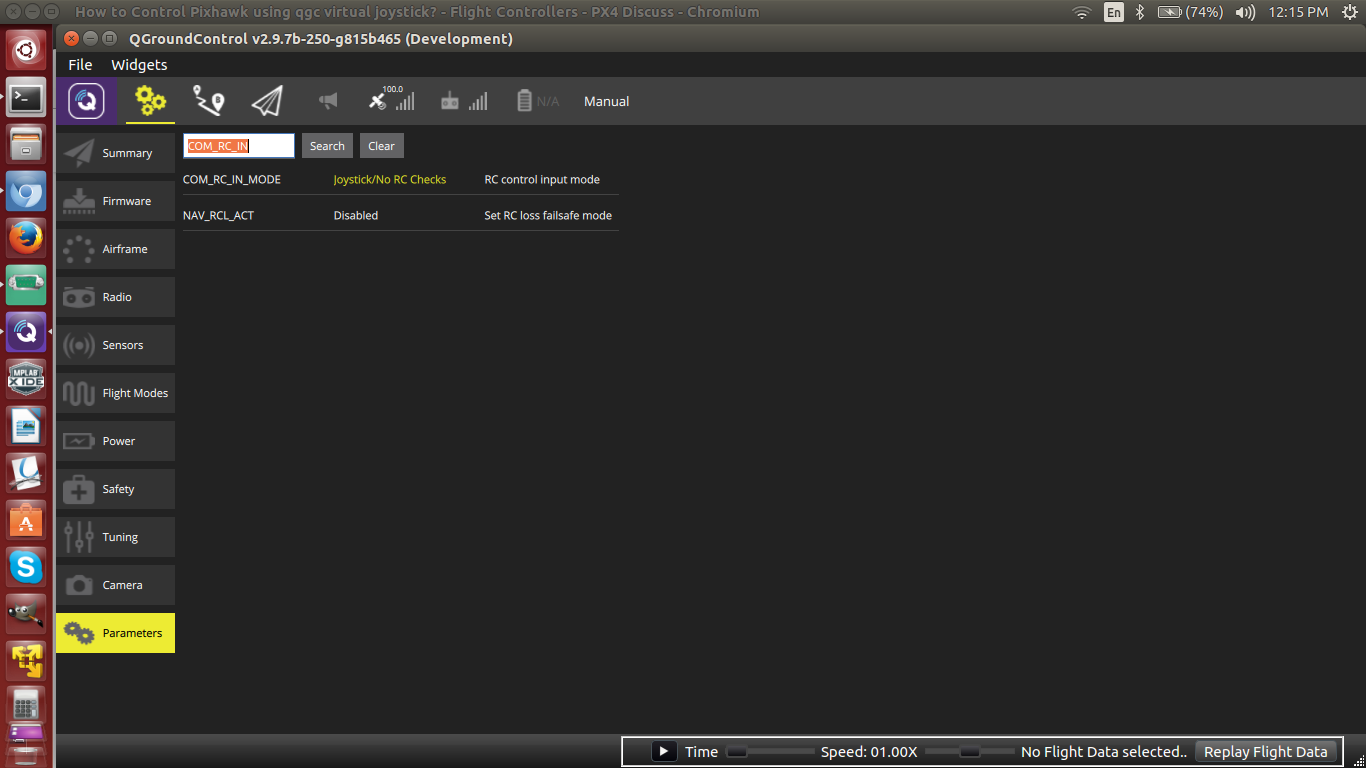
Turn on Virtual Joystick in QGC. Set COM_RC_IN_MODE parameter to Joystick - No RC Checks. Go fly.
yes I set COM_RC_IN_MODE as 0.
While arming getting error as “ARMING denied manual throttle non-zero” in qgc.
Also in console showing " WARN navigator timed out "
0 = RC Transmitter
1 = Joystick/No RC Checks
How are you setting these params? Just use QGC so you don’t get them wrong.
Use the latest daily build of QGC to fix the Arming denied problem
where is the Virtual Joystick how to turn it on?
Settings/General page
HI…Actually i have tried all thing above as mentioned but still it shows armed denied mannual throttle non zero and it also not going to the mission flight mode
Thanks
Is the throttle virtual joystick all the way down or in the center when you try to arm?
Thanks for your reply.When Throttle is all way down then is says flying with usb is not safe (i have coonected my pixhawk directly with usb ) and when throttle is in some other position then it shows armed denied manual throttle non zero
Thanks
If you want to test something with USB power you have to set circut breaker for USB check
https://pixhawk.org/firmware/parameters#circuit_breaker
Then the firmware is doing the right thing. Like it says you can’t arm with non-zero throttle.
Thans guys . Today i will go ahead with battery
I tried with the battery and it armed successfully (joystick position all the way down) in manual mode. But after giving take off command from qgc it shows Critical: Takeoff denied , disarm and retry. I tried again the same thing and i also calibrated all the sensors also but it shows same prob again and again.
That’s a firmware problem. QGC is just reporting what it gets back from the vehicle.
I faced the same problem. Let me tell you how to resolve this in details.
I had put the Auto-center throttle checkbox on. This was causing the throttle value to set to a non-zero value on startup. When the RC-checks were performed, obviously it was going to give an error due to non-zero value.
The other replies here ask to change the parameters, which are mostly outdated now. I did not had to change any parameters. JUST UNCHECK THE AUTO-CENTER THROTTLE BOX!