start jmavsim and set correct udp port for mavlink.(udp 14550 for receiving PilotPi mavlink message)
# The following is part of Tools/jmavsim_run.sh
java -XX:GCTimeRatio=20 -Djava.ext.dirs= -jar jmavsim_run.jar -udp 14550 $extra_args -qgc 192.168.3.165:14550
Hi @january147 , I’m also trying to run HITL, but on BeagleBoneBlue. There’s no px4_hitl.config for BBB so I’m trying to adapt the one for Pi. What I found and it might help you is that actual flag should be -h not -hil according to doc (System · PX4 Developer Guide)
Please try to change to:
sensors start -h
commander start -h
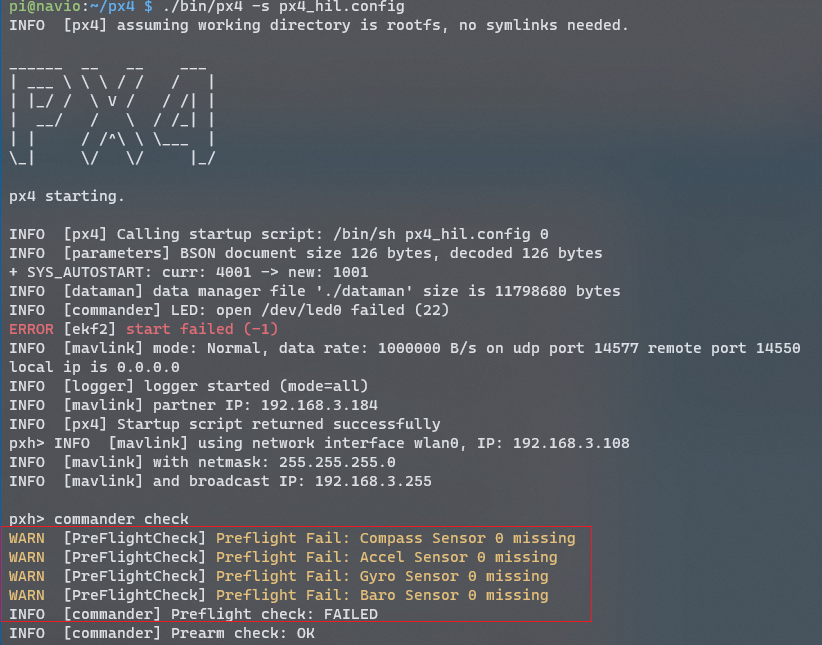
When I changed this I’m not receiving Preflight Fails, but still I don’t see the sensors messages. I wonder if it’s my wrong connection setting or something else?
Thanks, it works using “-h” instead of “-hil”. PX4 runing on rpi now received sensor data from jmavsim. However, The drone still won’t take off.
When I inputed commander take off in the px4 shell, it said
pxh> commander takeoff
pxh> WARN [commander] Takeoff denied! Please disarm and retry
INFO [commander] Armed by internal command
WARN [commander] Failsafe enabled: No manual control stick input
INFO [commander] Failsafe mode activated
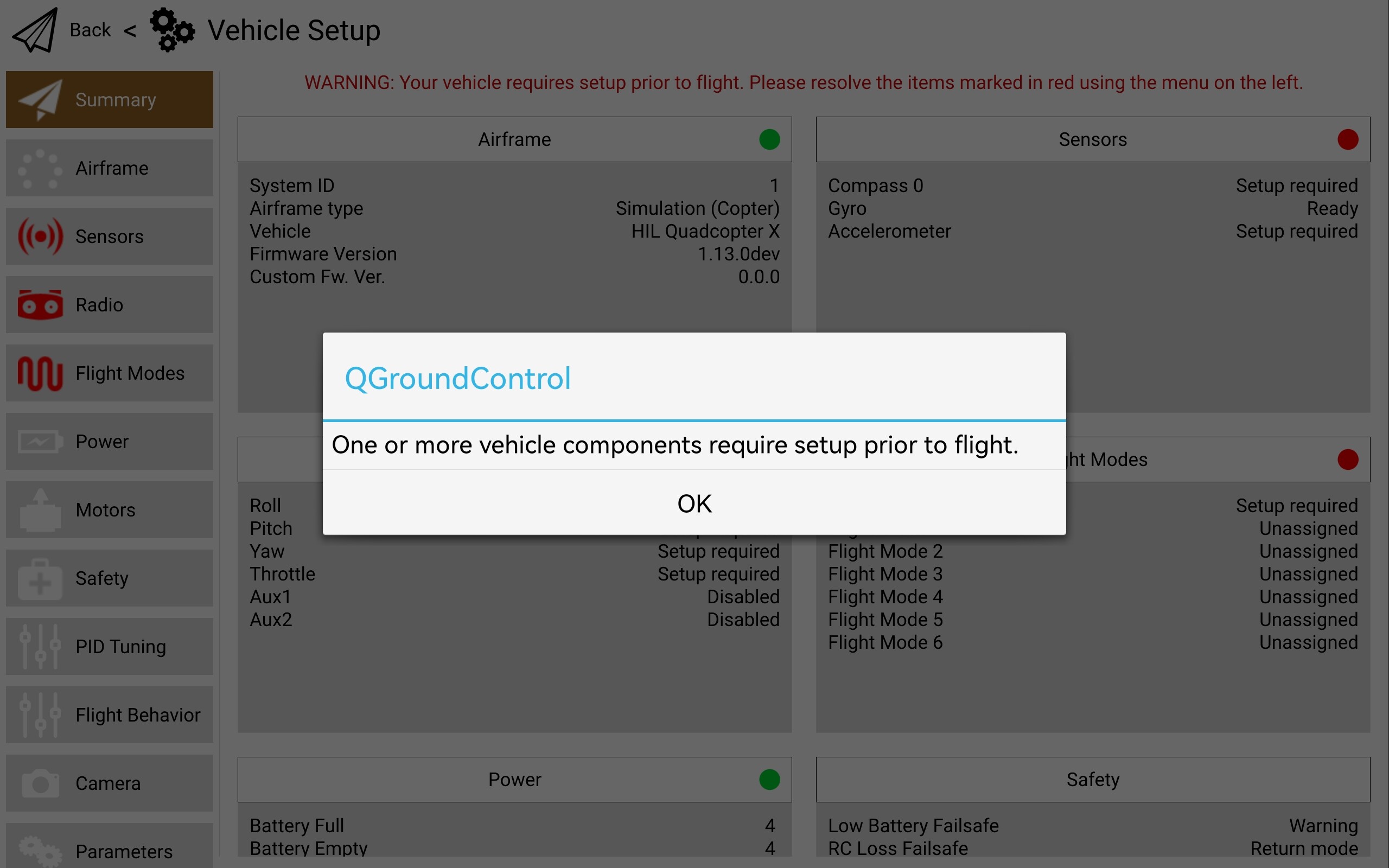
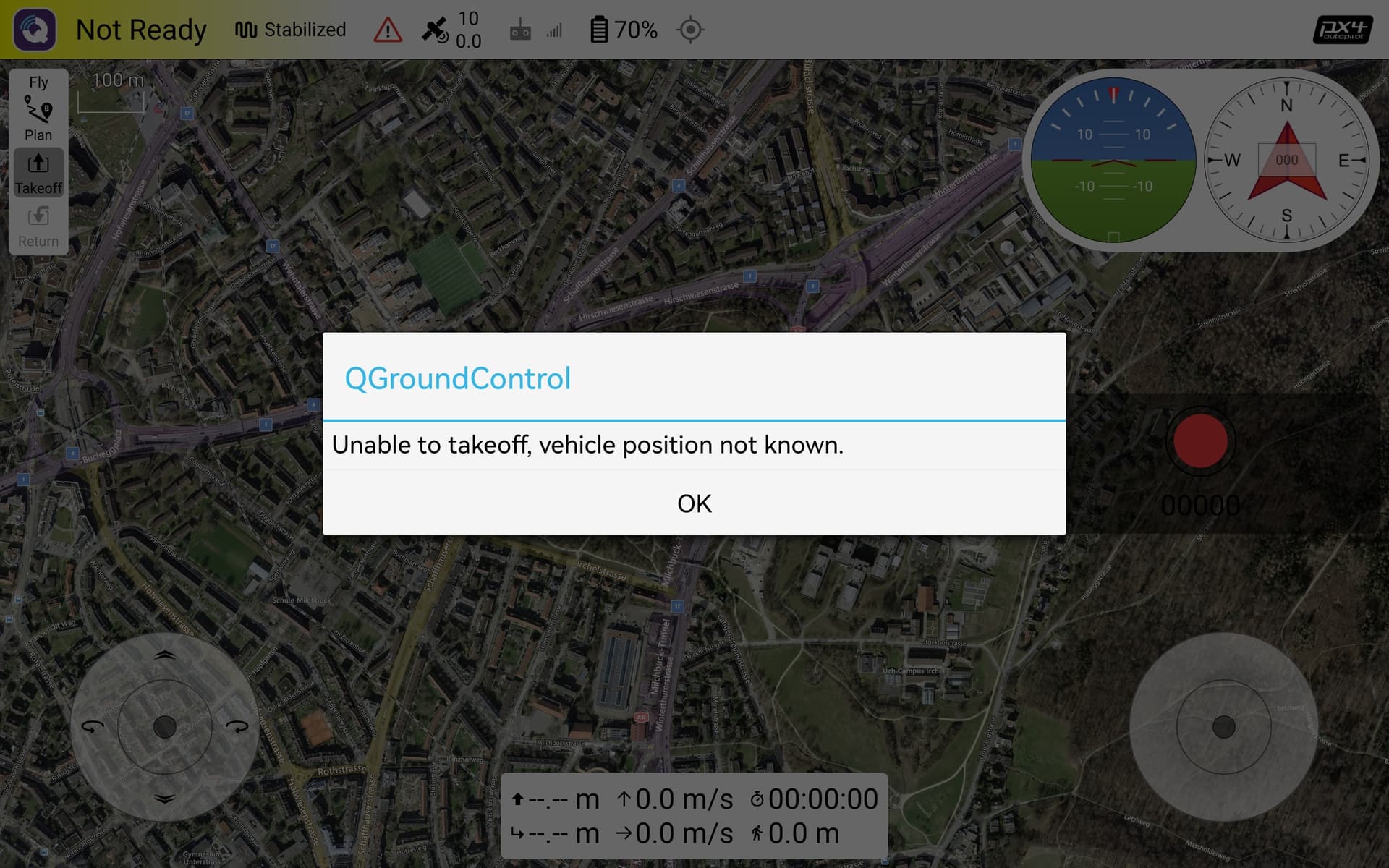
Then I connected QGC to PX4 through jMAVsim. I’ve got error “some components doesn’t setup”, such as sensors, radio and Flight modes. when I tried “takeoff” in QGC, it said “vehicle position not known”. Only “Arm” in QGC seems to work.
Hi, I’m also getting various failsafe warnings/errors, e.g
ERROR [commander] Remaining flight time low, returning to land
WARN [commander] Failsafe enabled: no datalink
WARN [commander] Failsafe enabled: No manual control stick input
It’s not clear to me if I should better change this in mavlink module and jMAVSim and leave this number to QGC or I should change the default port for QGC or do something else. The default scheme assumes serial communication between the board and simulator (Redirecting to latest version of document (main))
Hey man you made any progress, i am trying to use a custom flight controller and gazebo and having similar errors. My main issue is trying to get the hil sensors to start
Hi, I modified px4_hil.config as discussed and used . /px4 -s px4_hil.config to start the flight control, and I found that px4 gets stuck when executing ekf2 start.
Have you encountered such a problem please? Or maybe my px4 version (1.14.0) is not right .
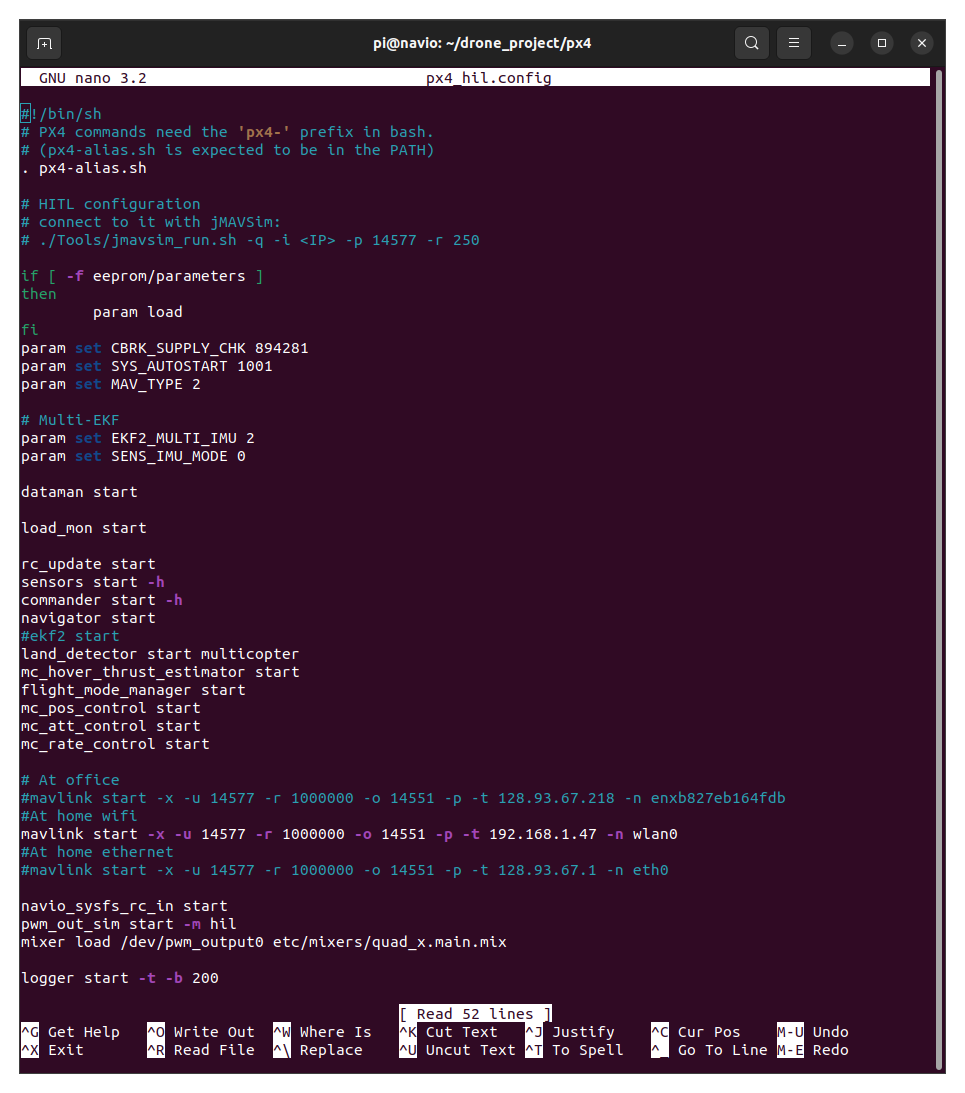
I managed to fly the drone in HITL mode using jmavsim. There are some errors in the px4_hil.config file. See the correct modified file below. I will list the modifications:
sensors start -h
commander start -h
comment out ekf2
pwm_out_sim start -m hil
Then launch using the following command -
sudo ./bin/px4 -s px4_hil.config
after that in the px4 terminal start ekf2
pxh > ekf2 start