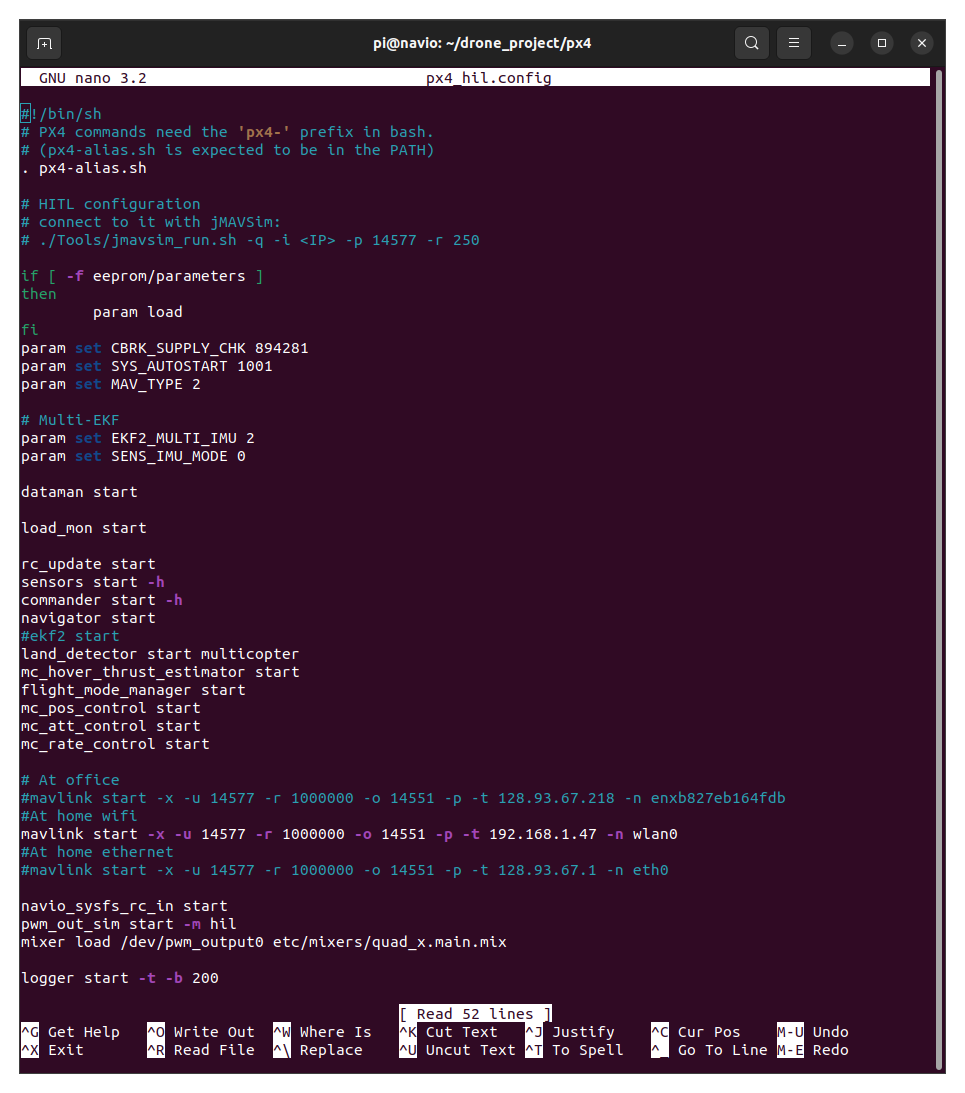
- First, I followed the instructions in “https://discuss.px4.io/t/hitl-for-pilot-pi/25776” to change
sensors start -hiltosensors start -h, andcommander start -hiltocommander start -h; - I used the raspberryPi with
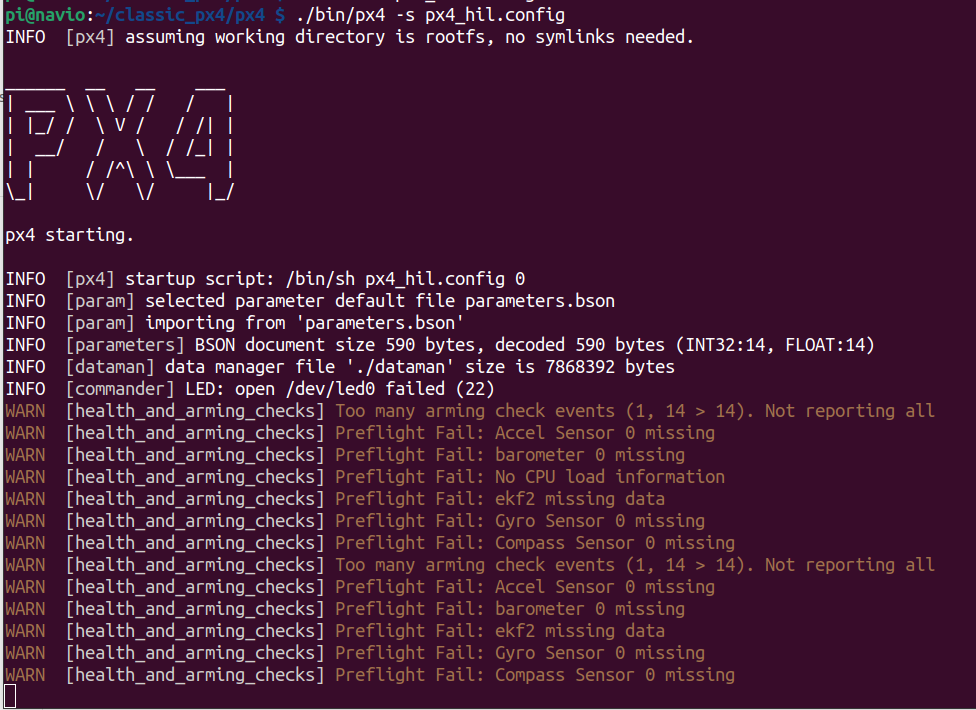
. /px4 -s px4_hil.configto start the flight control; - I found the flight control stuck at
ekf2 startnot starting.
What causes this and how can I start HITL on RaspberryPi?
I also have the same problem. lunching this command
. /px4 -s px4_hil.config
It gets stuck. Has anyone else faces this issue?
Here are the Images associated to this problem…
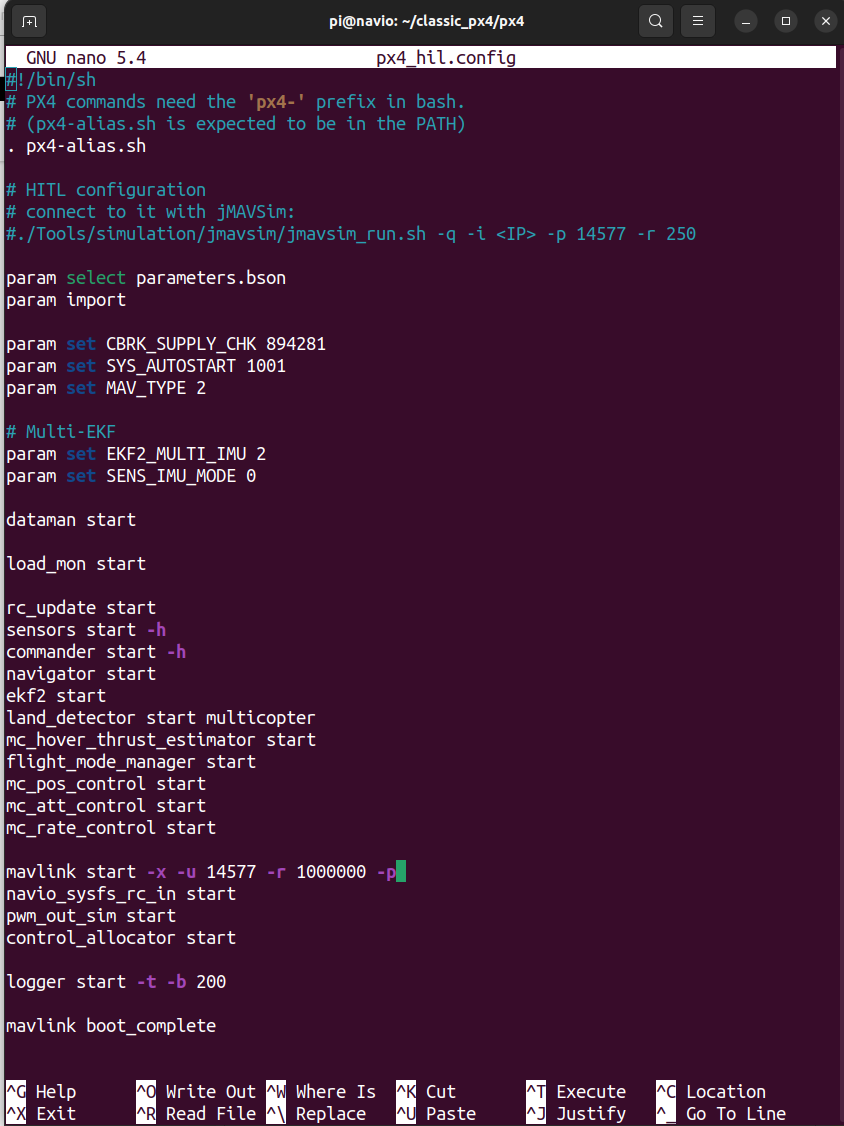
I managed to fly the drone in HITL mode using jmavsim. There are some errors in the px4_hil.config file. See the correct modified file below. I will list the modifications:
sensors start -h
commander start -h
comment out ekf2
pwm_out_sim start -m hil
Then launch using the following command -
sudo ./bin/px4 -s px4_hil.config
after that in the px4 terminal start ekf2
pxh > ekf2 start
Then using Qgroundcontrol ARM the drone.