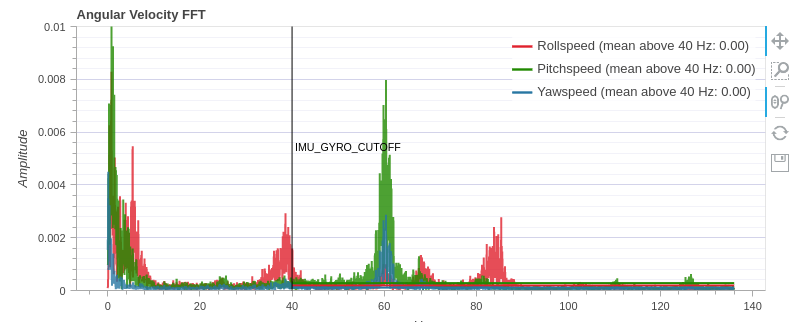
Do you see those peaks in the angular velocity FFT?
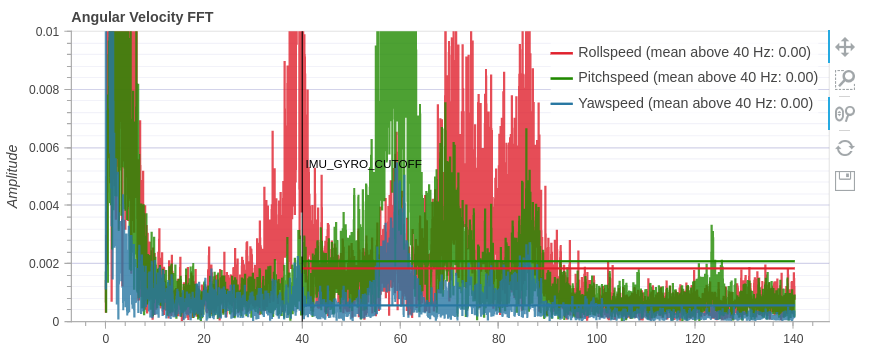
Those vibrations are probably generated by your drone and amplified by the rate control loop. You should:
- reduce the gyro filter cutoff frequency (to ~30Hz)
- reduce the d-gyro filter cutoff frequency (to ~15-20Hz)
- reduce the roll and pitch rate gains
The vibration profile changed drastically between those 2 flights. It could come from how you attached the battery.