Thanks. I’d leave for people here to discuss but I would think “I don’t care about yaw, just keep it” makes sense.
That said, my understanding is that the yaw is relative to the heading. So for this case when they cross the pattern, if the yaw is constant the actual direction faced will change. I.e. they can’t use this to implement the desired pattern.
You could use a setting like “Always keep yaw such that vehicle points to north” but then you end up having to have entries for every possible yaw value.
I’d think the easiest way way might be for QGC to give people the option to set a heading for the scan and then update all the waypoints appropriately.
Hmm, no simple solution yet, for a year…
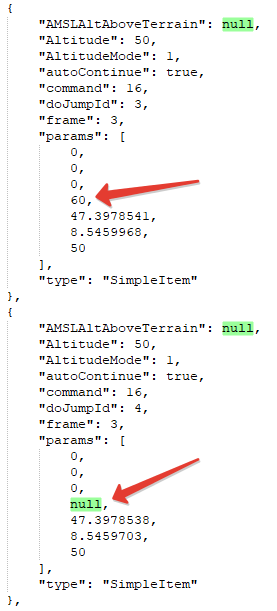
I think, currently simple workaround could be to download .plan file, generated by Survey in QGC to local computer, and write simple python/pearl script, which modifies “params”[4] in all mission points to desired angle instead of “null”. Then upload this modified mission file.
If anyone did that already - please share your experience. If not - I’ll try to do this myself and share mine…
Hi, were you able to find out a solution to achieve the fixed survey heading ( along the survey swath ) by changing any config or by altering code at the firmware level? @Andreas_Hoffmann@DonLakeFlyer@hamishwillee@copterspace