Hey guys,
I need some help. I am trying to do my first drone project and trying to take a manual flight as a step 1 using a Tx, Rx setup.
Hardware details
Flight controller: Pixhawk 2.4.8
GPS: ReadyToSky
Receiver: Fs-ia6B
Transmitter: Fs-i6X
After the sensor setup in qgroundcontrol[running on laptop], I am able to switch to different flight modes[currently configured to use Manual, Stabilized and Land] and arm the drone(see the motor move) using transmitter switches, when connected via USB to laptop. I see the “ready to fly” status on groundcontrol.
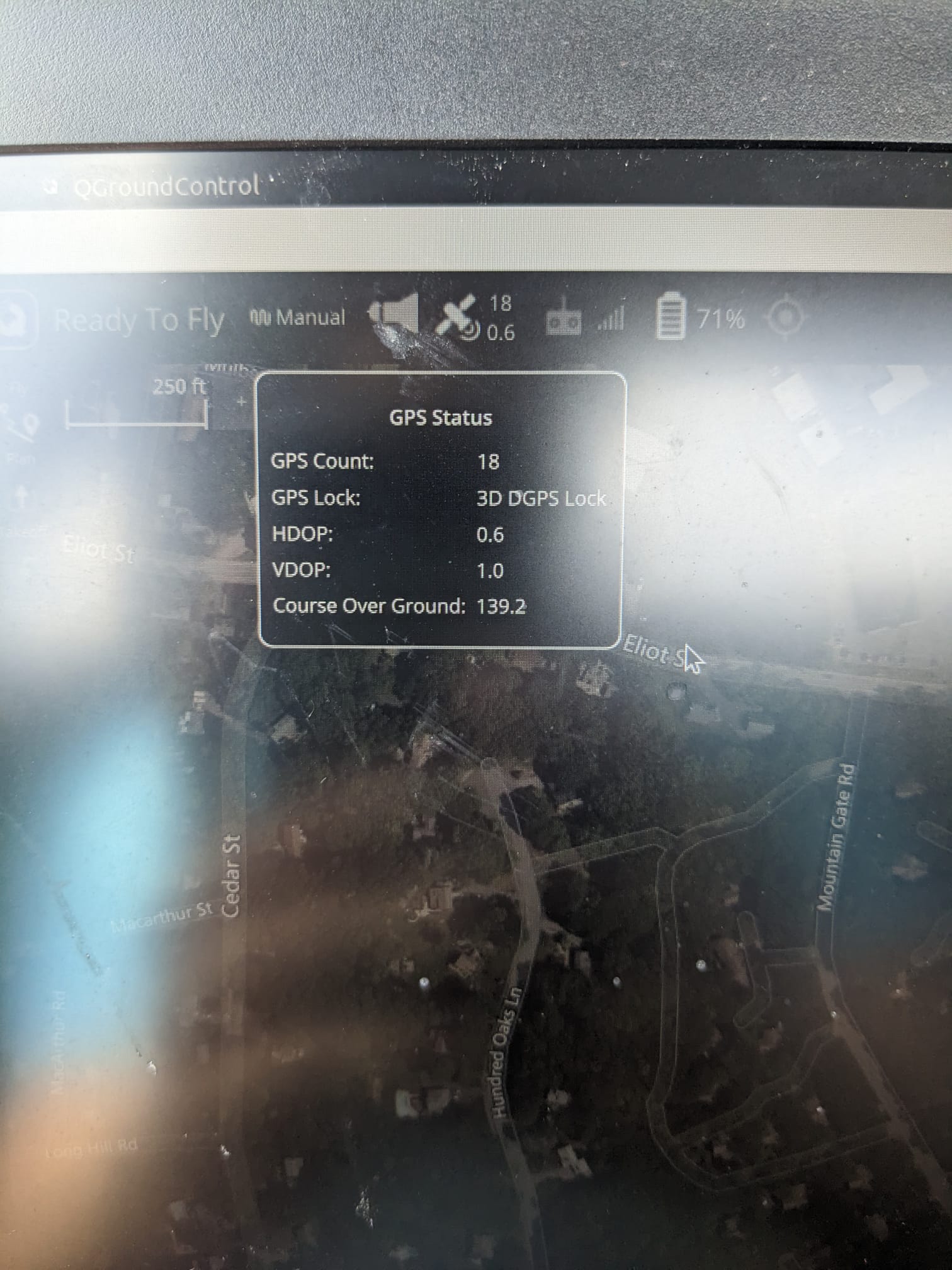
However, when I take the drone outside[to get better GPS coverage], and disconnect it from the laptop, the drone does not arm. It does not seem to be a GPS issue since I get a 3D DGPS lock[see image below], but its something else.
Maybe it needs a constant connection to the ground control while taking a flight ? Is having constant telemetry [wifi / radio] to ground control, a pre-requisite for taking a manual flight ?
I would appreciate any help since I have been stuck on this for a couple months now.