Aim
Given a GPS coordinates in LLA, find the corresponding pose (geometry_msgs/PoseStamped) in local frame.
Setup
- Ubuntu 16.04 with ROS kinetic
- PX4 simulation/gazebo iris
- PX4 Fimware: v1.10.1
- MAVROS: version 1.0.0
Issue
I am a little confused with the tf setup to achieve the aim mentioned above.
My approach was
- Get a tf frame setup like:
earth->map->base_link - Given the transform from earth->map, I can find the Pose in map frame for the LLA input.
The px4_config.yaml file was started with a setup like this:
....
global_position:
frame_id: "map" # origin frame
child_frame_id: "base_link" # body-fixed frame
rot_covariance: 99999.0 # covariance for attitude?
gps_uere: 1.0 # User Equivalent Range Error (UERE) of GPS sensor (m)
use_relative_alt: true # use relative altitude for local coordinates
tf:
send: true # send TF?
frame_id: "map" # TF frame_id
global_frame_id: "earth" # TF earth frame_id
child_frame_id: "base_link" # TF child_frame_id
# local_position
local_position:
frame_id: "map"
tf:
send: true
frame_id: "map"
child_frame_id: "base_link"
send_fcu: false
....
Unfortunately, my tf is as shown below,
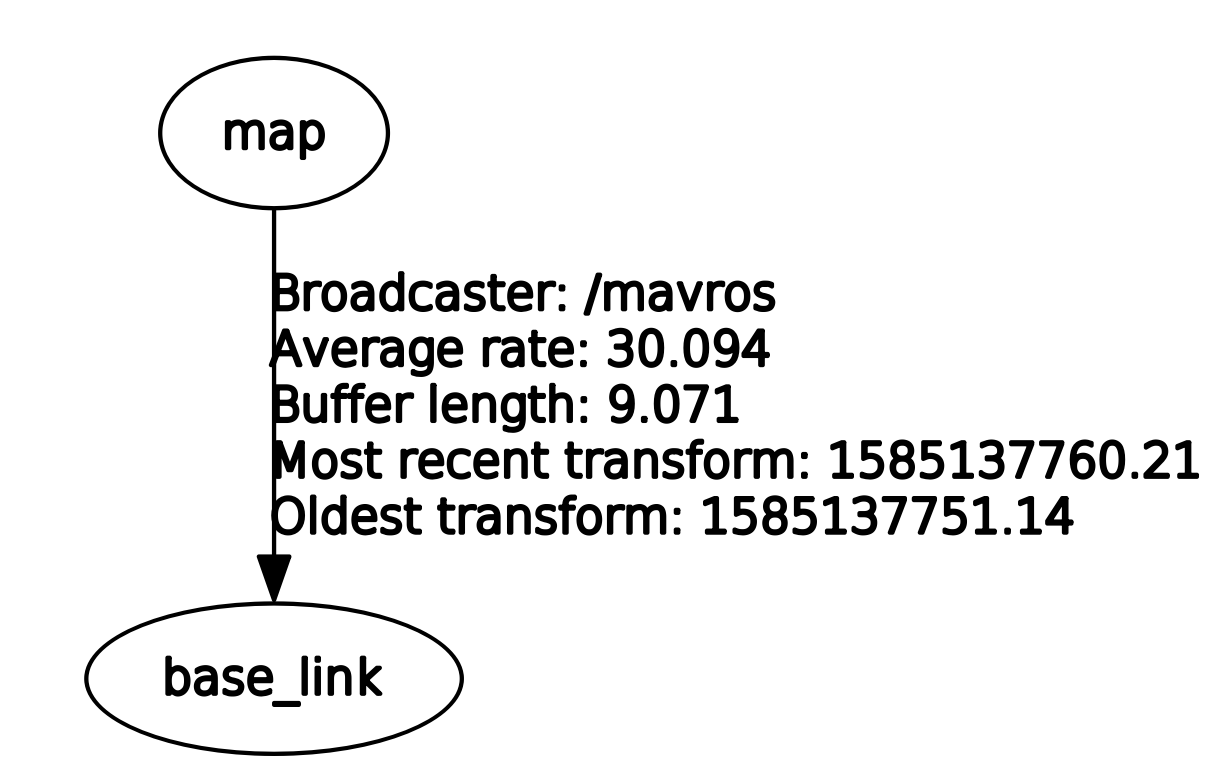
Can someone please suggest me a solution to this problem ?
Thanks in Advance,
Ashwin Sushil