Hi,
I am a beginner with ROS and px4, so maybe this question is more ROS than px4 related.
When I run the px4 SITL basic hovering example with odometry using gazebo, then my tf tree looks like that:
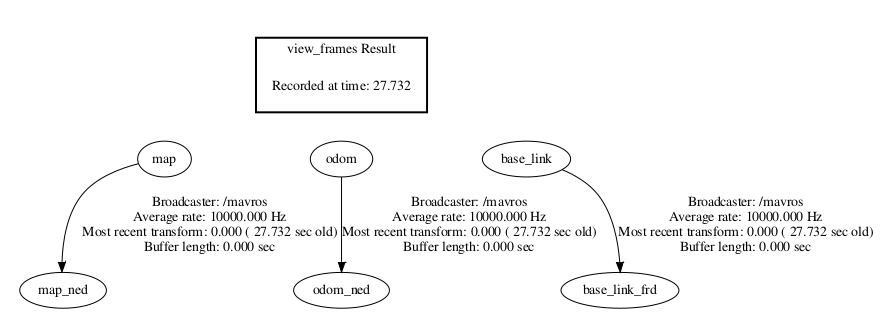
Neither gazebo or mavros is publishing a fixed “world” frame to which all of the standalone trees are connected. So how do I know the transform of odom to map, or how can I visualize all components in one fixed frame using rviz? Should I create that myself and how do I set up the transformations?
When I use gazebo without the firmware with rotorS simulation, a world parent is automatically published.
Any help is greatly appreciated!