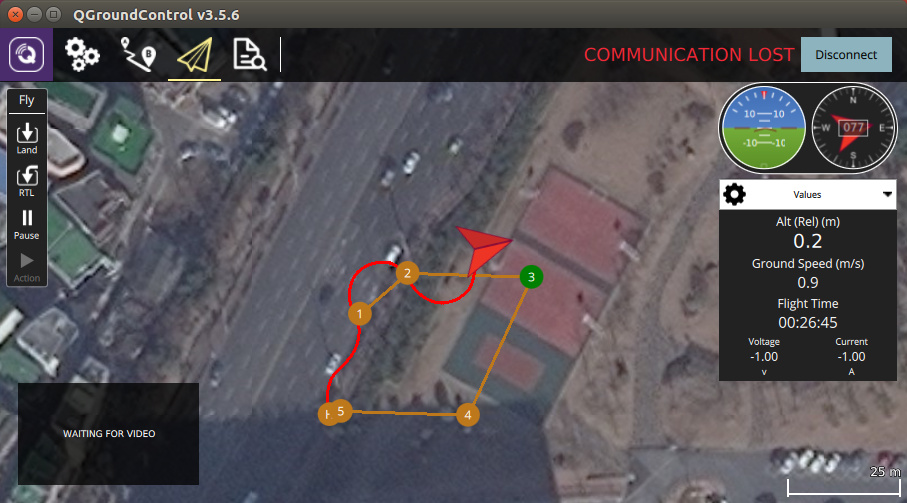
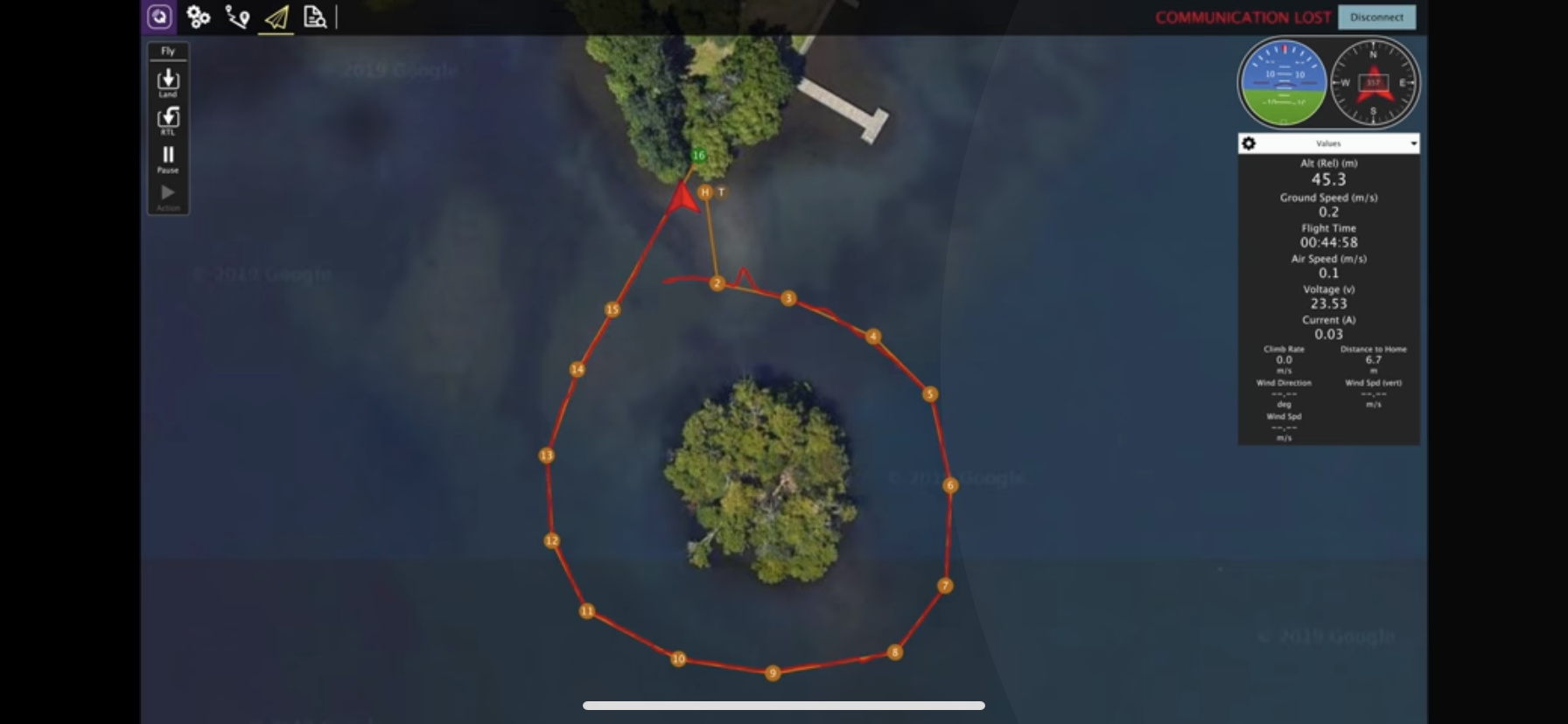
Thanks to the USV SITL integration work by @Jaeyoung-Lim, I am able to work on the USV SITL although there is an unwanted drift in the direction of both yaw and sway (or, maybe pitch, roll, heave, and surge motions are all combined).
During the past couple of days, I am investigating the cause of this erratic motion and still trying to figure out the cause of this problem by performing basic trials and errors (in particular, I am looking at gazebo_usv_dynamics_plugin.cpp, boat_sitl.main.mix, and 1070_boat files).
Is there anyone who progressed ahead by fixing the error? In the below, I attached all related links to this problem.
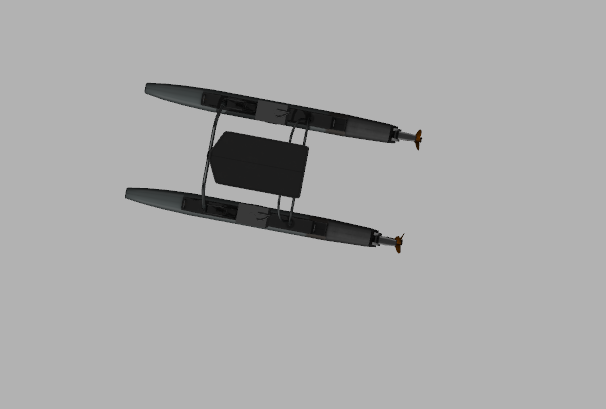
The usv_gazebo_plugin actually is part of the osrf/vrx project which I removed the ROS dependencies and simplified a bit (e.g. you can run it without the wave plugin)
One of the reasons of the erratic behavior is that because there is no feedback in yaw control. Therefore it oscillates around the setpoint. This is why I tried adding a body rate controller specifically for boats: https://github.com/PX4/PX4-Autopilot/pull/15257
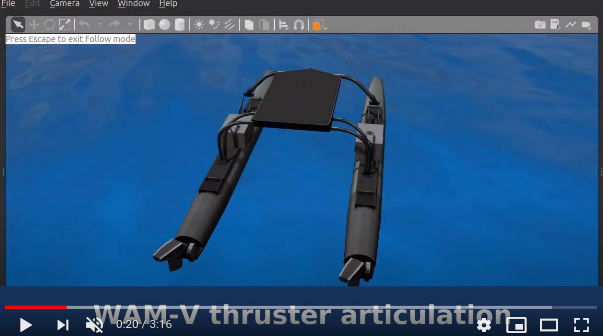
Regarding thrust articulation I have removed it completely intentionally, since articulation brings over actuation to boat control, which we would want in the future but we need to get differential thrust boats right first.
I will be happy to support you on getting the boat working.
Hi @Sunghun_Jung where you able to run boat simulation reasonably well using PX4 SITL?
Also, where you able to integrate other boat models from vrx with PX4?