Hello all,
Most of all, I do appreciate hard work on the PX4 open-source development to the PX4 community.
[Background]
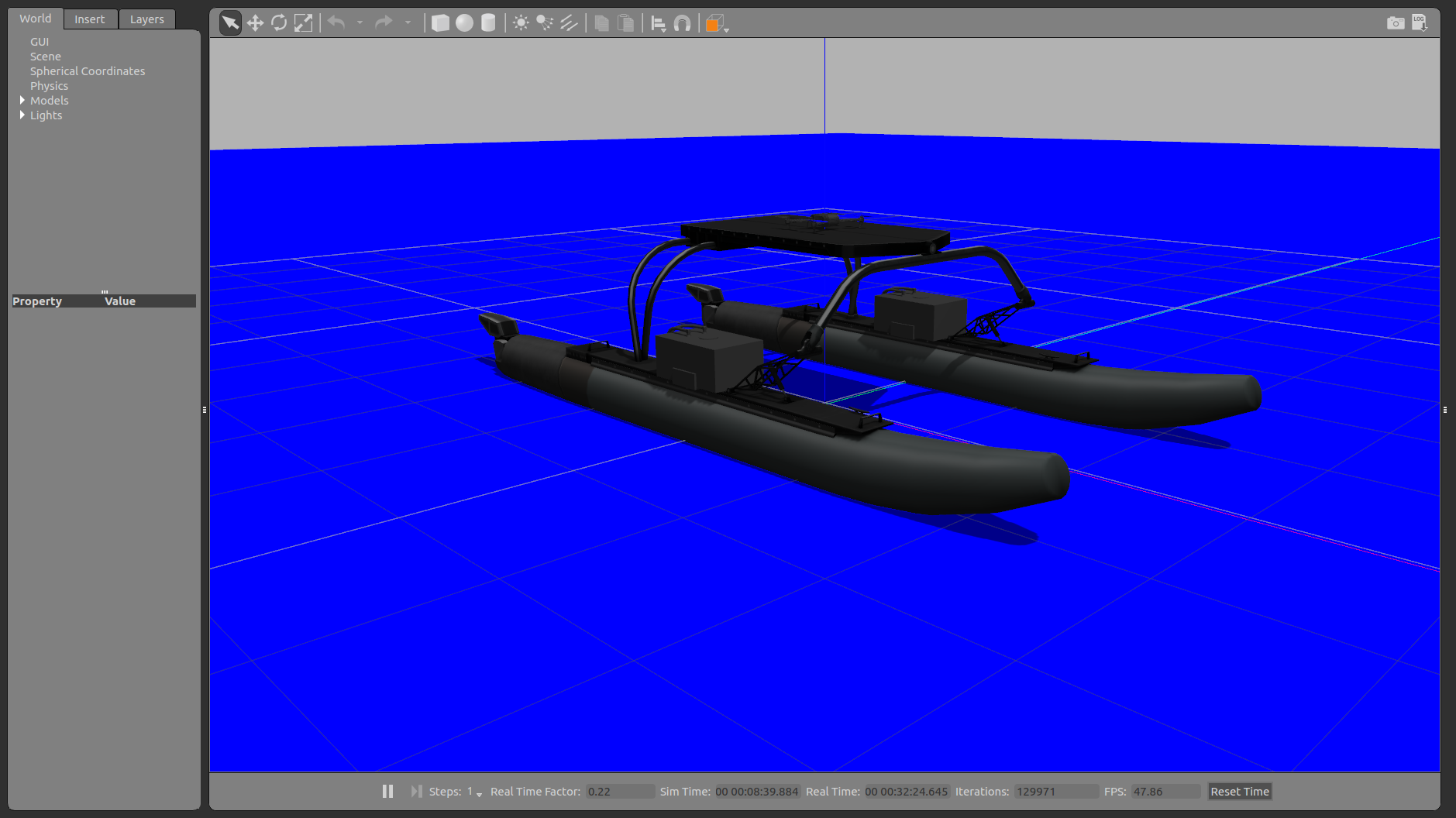
Today, I leave this new topic to ask a guide to solve the issue arising when I am working on multi-SITL using a UAV (iris model) and a USV (boat model). Basically, I am trying to simulate a data acquisition mission using both a UAV and a USV and I could successfully spawn a UAV on top of a USV as shown below.
[Problem]
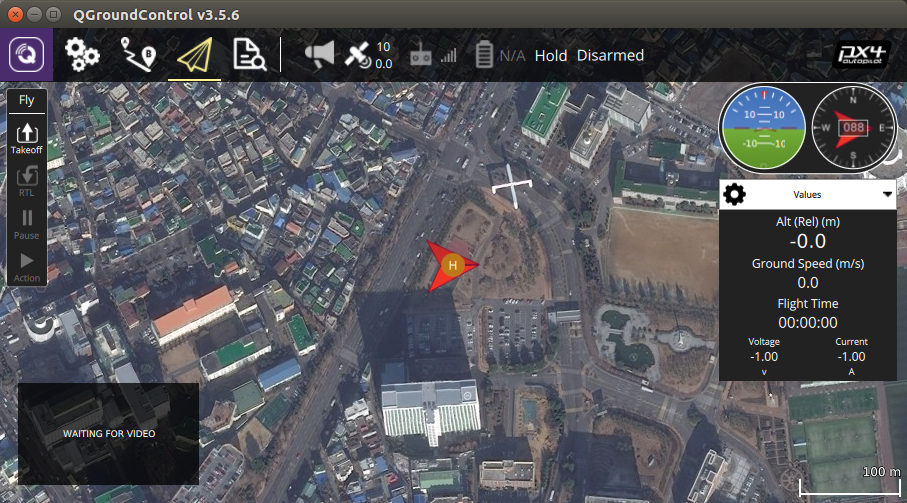
The problem to solve at the moment is that I could not get two TCP port connections with QGC so that only one UV appears on the QGC. Only the TCP port of the USV is connected with the QGC and I could move only the USV when I upload waypoints. However, even the movement of the USV does not correctly work (the USV is just circulating around the home position rather than moving to the first waypoint).
[Trial ended up with failure]
To solve this problem, I tried to modify multi_uav_usv_mavros_sitl.launch, boat.sdf, iris.sdf, single_vehicle_spawn_uav.launch, and single_vehicle_spawn_usv.launch (all files are attached).
I also leave here log files when I ran multi_uav_mavros_sitl.launch (multi-SITL works) and multi_uav_usv_mavros_sitl.launch (multi-SITL does not work).
I am suspecting the incorrect definition of the TCP port number but do not know what else I can try more. I do appreciate any comment to tackle this problem.
boat.sdf.pdf (45.1 KB)
iris.sdf.pdf (47.6 KB)
log_both uav and usv.pdf (45.1 KB)
log_three uavs.pdf (53.8 KB)
multi_uav_mavros_sitl.launch.pdf (30.5 KB)
multi_uav_usv_mavros_sitl.launch.pdf (23.5 KB)
single_vehicle_spawn_uav.launch.pdf (20.3 KB)
single_vehicle_spawn_usv.launch.pdf (20.3 KB)