If you take over 5 minutes for the question, please continue in Discord or a Github Issue.
Q.1 : Vertical Speed compatibility to PX4
This PR
@dagar mentioned the PR could be valuable more if we can investigate more on how this can be a benefit for PX4 maybe in larger scale and got through.
Q.2 :
Q.3:
Recommended that log files to be provided for investigating more on this.
Q.4:
@not7cd mentioned to work on the new fork to bring the possibility within a week or two.
Q.5: Position controller compatibility for rover
@AlexKlimaj Is position controller supported on the rover?
Needs to be figured out how implement it first and then find a way to bring the compatibility.
Q.6 :
Marco Spano asked about the guideline how to port the PX4 bootloader to a new board (RISC-V)
The recommendation was to go over the available bootloaders for H7 boards to understand the architecture implemented.
Q.7 :
@blazejg Hi, I have a question.
Am I able to fly the drone with GPS and VIO? VIO should be used as a backup system if there is any gps noise during the flight. Is there any option to turn off the gps during the flight and continue the flight only with VIO?
Indeed this is possible with PX4.
Q.8 :
Q.9 : EU New Requirements for drones
by Roman Ligocki: Is there a way to apply a way that the drone gets itself away from the restricted areas. The decision system has to be onboard and has to made by the autopilot itself.
dagar: First the requirements have to be settled then based on that we can move forward to provide it. Is that needed to be implemented on an embedded system. A database has to be provided as an API to see how to implement possibly with Geofence capability.
General Discussions
D.1 : Thanks for Pegasus Simulator
@MarceloJacinto has mentioned how useful it is to have Pegasus Simulator which he is the contributor to be integrated with PX4-Autopilot framework.
His use case is to have Aerial Robots follow targets as a part of hid PhD studies dissertation.
Hi team! I read the documentation here: XRCE-DDS (PX4-FastDDS Bridge) | PX4 User Guide.
I am still a little confused on how to get the microdds_client and px4 messages set up.
Also, if I try make anything other than px4_sitl_default gazebo , I get a does not exist error. Am I missing a step?
So for the first one, my coworker and I were debugging a driver that uses a mavlink instance, but when we cannot stop a single mavlink instance in PX4 while it is running. We get a message saying that we need to close all the mavlink instance, and I’m wondering if there’s a way to close a single instance of mavlink?
Second one, is that I was playing around with the failsafe_flag, and I was wondering how reliable those are? I’m asking because I was testing my GPS, and I was able to get correct values. But when looking at the flag, I was getting the gps_position_invalid. So I was wondering if that’s normal?
Which implements what I want to achieve with my PR. Fix such behaviour, and enable omnidirectional movement for my engine configuration:
What I really need is lateral movement in very narrow cases during my mission. One is holding the position of the robotic arm reaching somewhere. For now, I can move my autonomous surface vehicle like a wheeled rover.
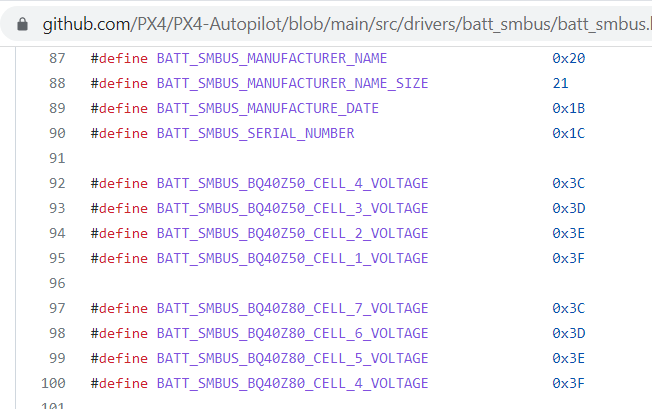
Do these cells use same address? Want to also understand whether anyone has tested this and where on QGC is cell voltages shown! I’m new to PX4 and QGC.
 Community Announcement
Community Announcement Community Q&A (No deep technical discussions)
Community Q&A (No deep technical discussions) Guideline for asking a Question
Guideline for asking a Question General Discussions
General Discussions