I flew my fixed wing drone for the first time and shortly after takeoff it crashed. I don’t have experience reviewing the flight logs, can someone assist with reviewing the flight log to help identify the cause?
There was a light wind when I took off (in stabilized mode). After 30 seconds of flying I switched to hold/loiter mode, and which point the plane nose dived and the log ends. I couldn’t recover and the plane flat spinned till crashing. When I inspected it the battery was missing - I believe I hadn’t secured the battery properly, and the nose dive caused the battery to come loose. However I don’t know what caused the nose dive after switching to hold mode.
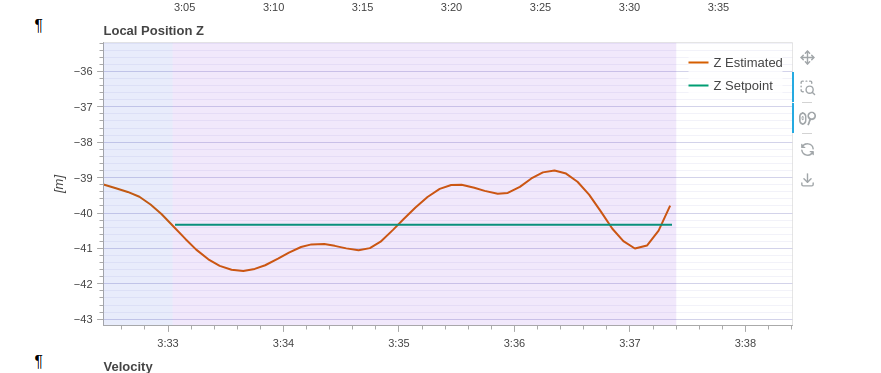
Hi. At the and of the log plane still about at 40m
As you can see autopilot feeding desired altitude as 40m and it is normal. So it is looking like a power loss while plane still in air.
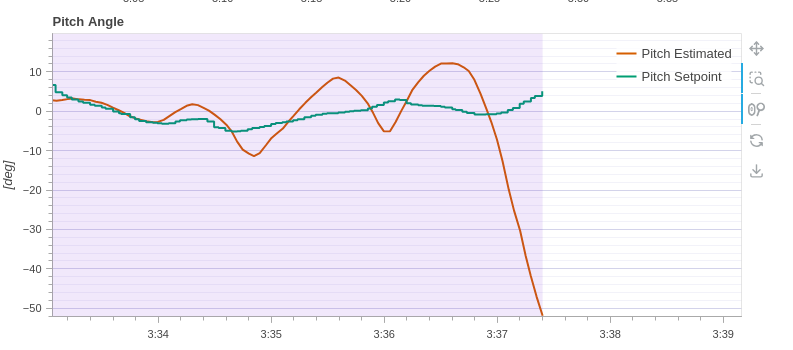
And pitch angle setpoint is normal too but as you can see although this at the end vehicle diving .
Also as you can see before switching to loiter airspeed is too low. If we consider before takeoff airspeed already showing about 3-5m/s probably vehicle was too slow before switching to loiter. Pitot calibration before takeoff could be better. If you see readings about ±2 m/s it is good.Consider your stall speed and stay above this.
To sum up, I think your battery disconnected and vehicle start to dive but if so probably we could not see dive part at the log. Or as you say vehicle entered stall and while diving battery disconnected.
BTW vibration data not look very clean. How did you mounted FC board ? I think generally mechanical issues not software.
These are my opinions. May be someone can make more accurate comments.
Thanks! The flight controller is mounted using a 3m foam mounting tape.