First test flight after Pixhawk firmware update. Once the drone was in the air it refused to descend below @8-10m (my visual estimate - telemetry reported negative 8m at that altitude). Repeatedly attempts to land in both stabilized and RTL modes were unsuccessful resulting in crash after the battery ran low.
The flight log is here. Any assistance analyzing it to figure out what the cause would be helpful.
You were in altitude control mode the majority of the time. Did you have MANUAL or STABILIZED modes configured on RC? Those modes have manual throttle control and could have been used to bring the vehicle down.
I’m no Expert but I have had a look at your Log. There are a few things that jumped to my eye:
Oscillations specially in Z Axis are rather high. This might have confused the Estimator. I think the source may eben be Tuning since the Motors probably cause this while stabilizing all Flight Axis. Did you do PID Tuning?
You did not actually Switch to stabilized Flight Mode, I would say there is a configuration Problem of matching your FlightMode Switch PWM Values to the thresholds assigned to the Flight Modes. Actually You only switched between Altitude Control, Loiter, Land and RTL. I can see different PWM Levels for the Flight Mode Switch but they did not match and did not trigger other modes.
What Firmware are you using, this seems to date around Spring 17.
Something is weird with your Setup. Motors 3 & 4 are spinning much higher then 1 & 2. This hints to the Motor Mounts not being mounted properly, ESC not learned or Props being not the same for CW / CCW.
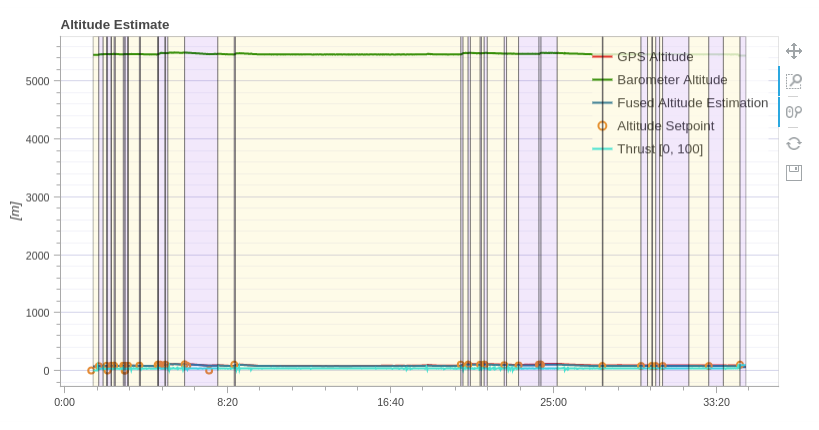
And as Dagar already mentioned your Baro is weird too.
I think you’ve both hit on something with the lack of stabilized flight mode (i.e. flight mode configuration issue). I’d missed that before but its rather obvious from the log now that it’s been pointed out. You can see I was able to manually change altitude in altitude hold mode though so I still don’t understand the ‘floor’.
The weird barometric altitude leaped out at me as well, but it was so far off the GPS altitude that I have no idea how to interpret the mismatch.
FW should have been latest stable as of mid-November (flashed with QGroundControl around then, but I don’t have an exact date).
Props were matched and had been used on prior flights. I need to absorb the rest of this info further, but in the meantime I appreciate the help.