The issue was the flight was located at high altitude landing set point, and hence I could not land it as required. Corresponding parameters and logs are shared below. I would request anyone to explain the reasons and suggest me how to solve the issue.
What exactly was the issue? What happend during landing?
Only thing I can see in the log is your UAV’s output 3 went 100% during the entire mission mode flight, so if there was any problems during the mission mode it is most likely because you reached the limits on your UAV.
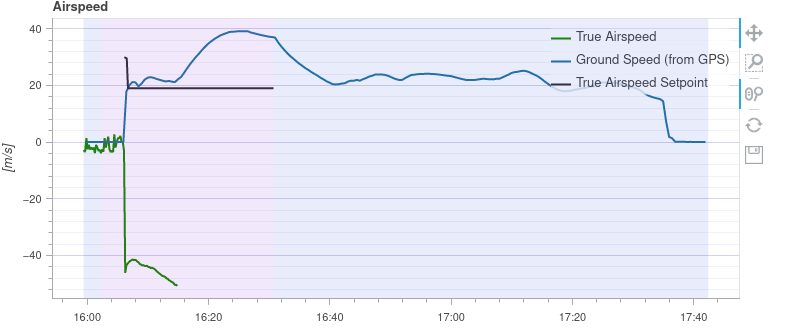
In auto-landing the speed of aircraft was about 18-20 m/s and its altitude is more than 4m on the landing ground.
It was expected to land at lower speeds and the altitude nearer to ground.
How to maintain the required speed and altitude for the aircraft during landing, without any unwanted effect on its heading?
I don’t have a lot of experience with fixed wing, mainly used multicopters. But from what I can see most of the log is flown in stabilised mode, so I’m assuming that doesn’t have any automated landing and you are flying it manually?
I’m guessing the Airspeed sensor failure is the reason for it switching out of mission mode. Otherwise, you might accidentally have hit the manual switch to change it.
Not sure about the exact explanation, but could you try giving another go with the airspeed sensor correctly set up? That would be a faster way to verify if the problem is solved