This was my first automated landing with PX4 https://logs.px4.io/3d?log=ebdf63a3-c3c6-4b6c-899b-29e036cd545e
Needs some repairs and tuning to test again. Comments of course welcome.
This was my first automated landing with PX4 https://logs.px4.io/3d?log=ebdf63a3-c3c6-4b6c-899b-29e036cd545e
Needs some repairs and tuning to test again. Comments of course welcome.
@mijarven it looks like you have a number of issues going on. Possibly all related to vibration, but tough to tell. The spectral density plot looks noisy and your throttle outputs seem a little wild. You are loosing signal to your GPS/Mag several times and your airspeed measurements dropping signal too. I’m guessing this is all related.
In that current setup pixracer attached just with velcro using it’s 3D printed case. External GPS/mag from mRo (M8Q) used. But, I could attach pixracer better that’s for sure.
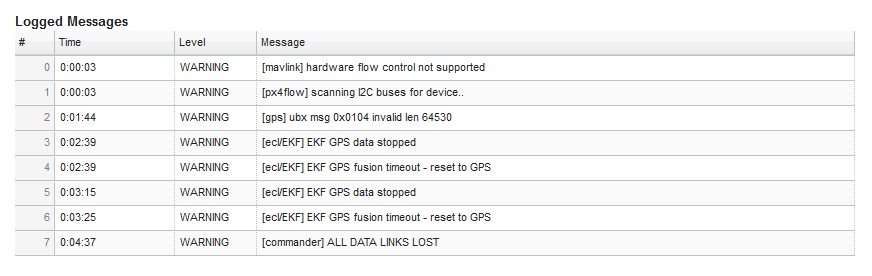
@mijarven here are some of the interesting details I see in your log file:
at 1:44 there is a “ubx msg 0x0104 invalid len 64530” warning. This could be an indication of corrupt data over the GPS serial line. Check your wiring.
The GPS data stops completely 5 times, again this indicates you probably have some wiring problem. Also, for some reason the EKF only shows 2 logged GPS problem events which seems like an unrelated PX4 problem, i.e. it should be logging a message anytime GPS data disappears I would think…? (@dagar ? @Paul_Riseborough ? ):
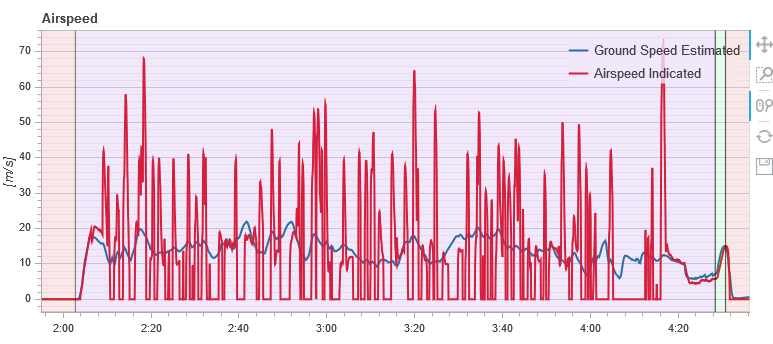
your airspeed data is dropping in and out constantly. Probably a wiring problem again. I don’t know why there aren’t any logged messages about this, should there be? (@dagar)
I’m guessing having the airspeed drop in and out is causing the controller to do bad things with throttle, which is also hammering on and off:
overall, check your whole avionics installation.
Hello all,
I am experiencing fixed wing landing challenges as well - my plane is starting an uncontrolled dive, when entering the landing waypoint. Without interacting by switching to manual mode, it would crash into the ground due to an extremely too steep glide angle. Does anyone experience similar issues or has an idea about this unexpected behaviour?
I am using QGroundControl for the mission design.
The logfile is attached here:
https://logs.px4.io/plot_app?log=00f4dbd8-0041-48de-a983-6d1fb88f71c0