Hi guys,
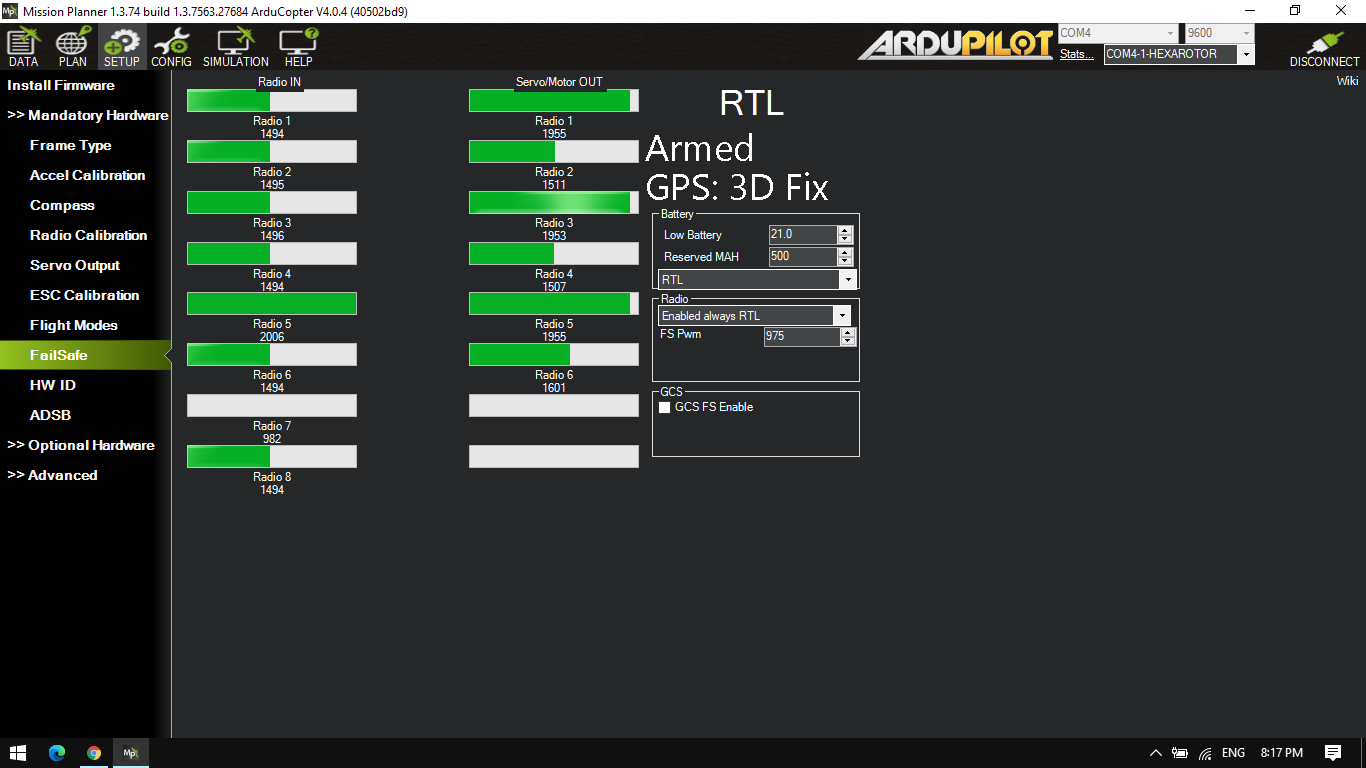
I’m trying to simulate failsafe without the props connected to Mission planner. I’ve set my Taranis to “NO PULSE” with R9M receiver. Failsafe works fine when the check box is ticked to land and the motors will shut off. When I enable RTL from failsafe and take off then switch off my transmitter it will go into RTL but it will not land and disarm my motors. Looks like when RTL is triggered it keeps climbing instead of landing. I also have channel 7 set to RTL on my taranis switch not sure if that is interfering with the failsafe. I have been trying to figure this out but I’m lost and cant figure out the issue. I do not want to fly this copter until I know its safe to do so. Help would be really appreciated. Thank you.