Hello!
We have two flights on our quadrocopter with strange and unsafe behaivour:
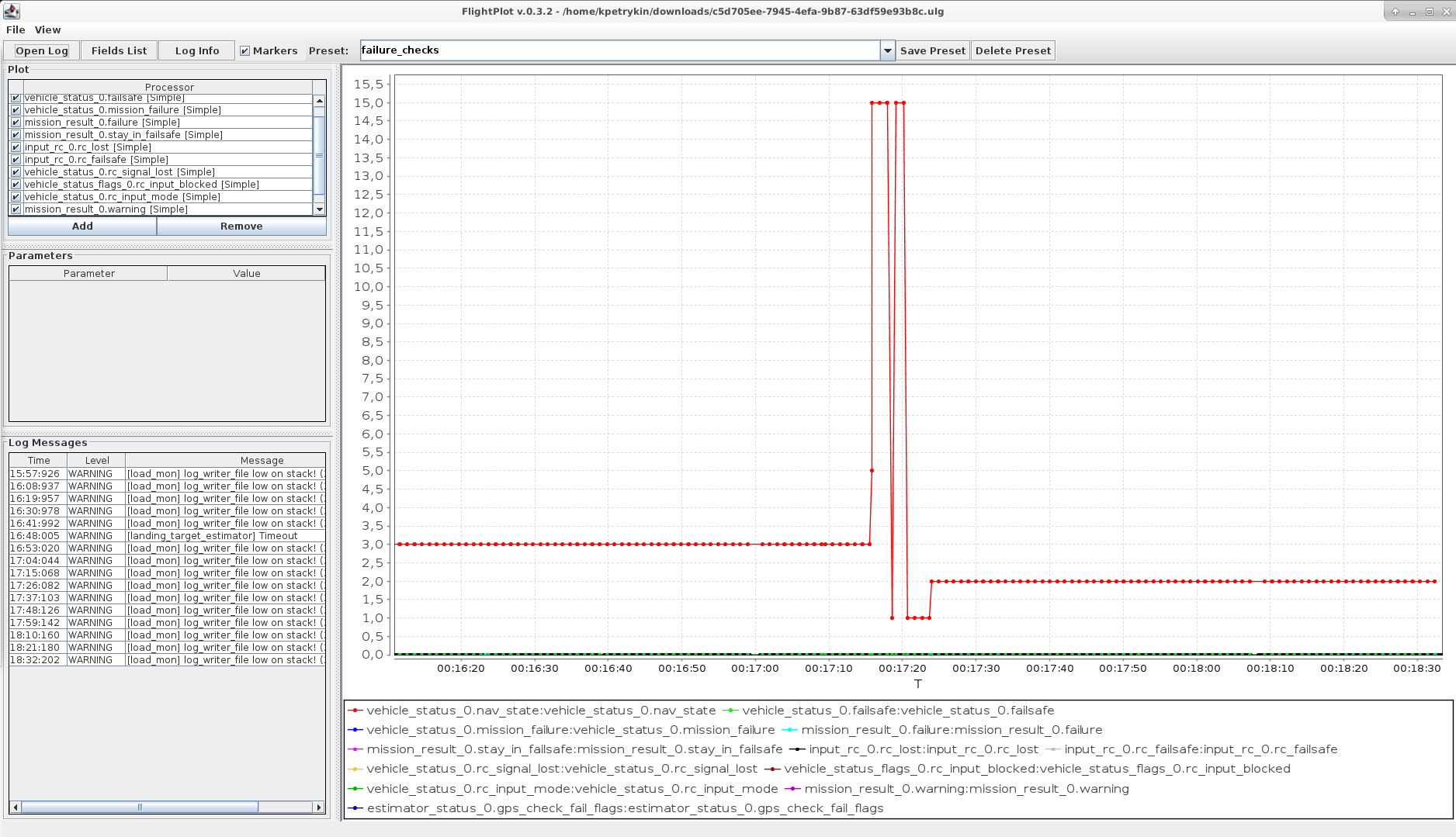
- Mission started, copter took off to 60 meters, flew a little, then fell out to RTL for a few milliseconds and then to Stabilized (mode trigger on the RC was in this state at this moment). No any messages about erros arrived and no watchdogs also. Log: https://logs.px4.io/plot_app?log=c5d705ee-7945-4efa-9b87-63df59e93b8c
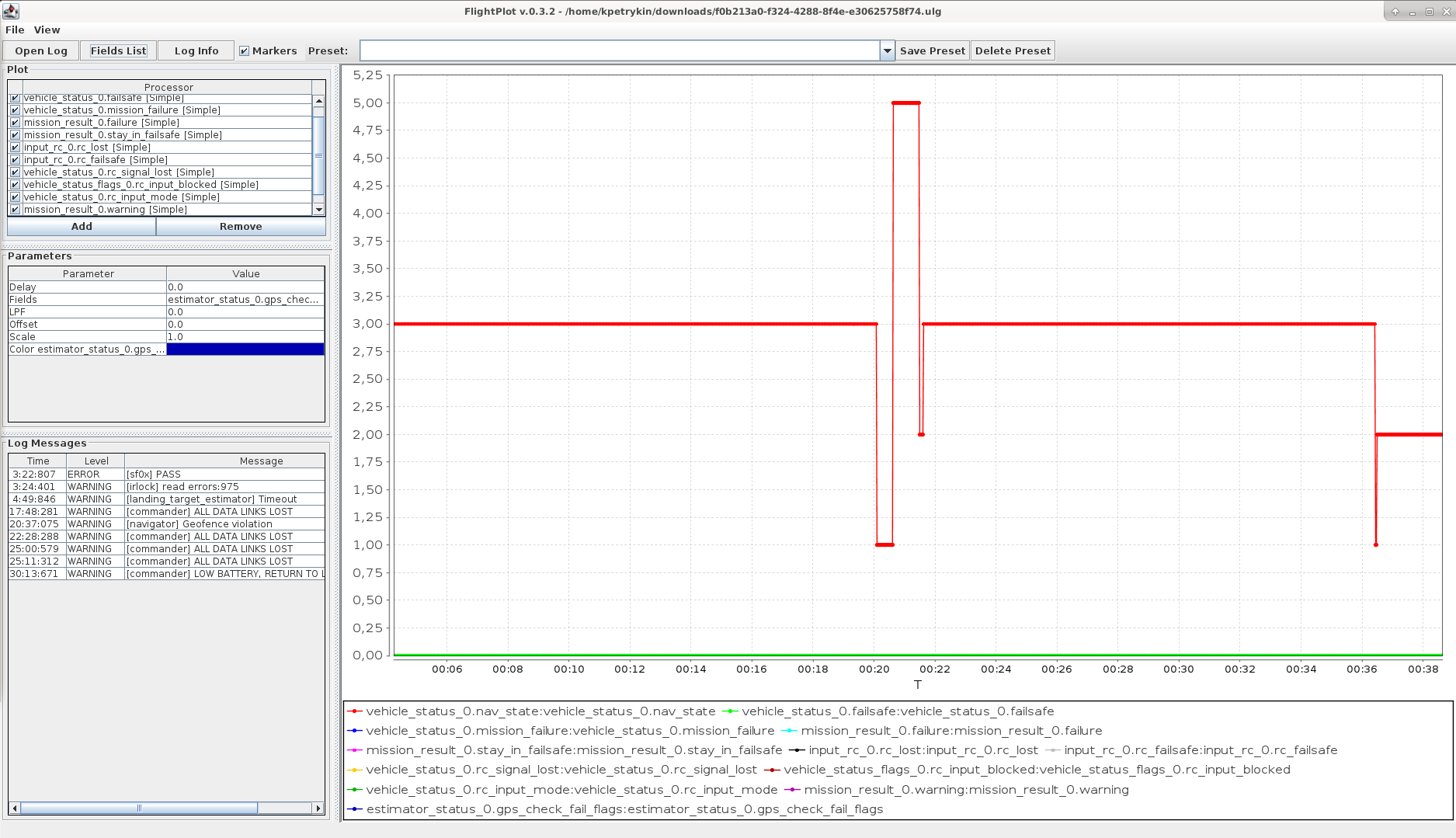
- The second mission was quite long, and suddenly copeter fell out into Althold (was on RC trigger at the moment). Again, no any messages or watchdogs. Log: https://logs.px4.io/plot_app?log=f0b213a0-f324-4288-8f4e-e30625758f74
It may look like position lost failsafe, but when we have it in another times, we have a error messages, watchdogs and other signs in logs.
So, my main question is: in what cases the mission could fall into RTL and/or into rc-controll?
Just a guess: have you made sure that RC failsafe works properly? So e.g. when you switch off your RC does it detect it and say “RC lost” in QGC? My guess is that your RC receiver sets “failsafe values” when RC is lost which means the mode switch goes to stabilized, and throttle to low.
I dive into logs and there’s no any failsafe flags there (red line is mode switching, others are different fail checks and they are all in zero)
It would not be a failsafe in PX4, only in the receiver.
Failsafe in the receiver? How should it work? “Trigger” an RTL trigger?
If a receiver doesn’t receive a signal anymore, it either sets all channels to a certain value to indicate “failsafe” or it stops outputting a signal altogether.
For the latter case Pixhawk will detect that it lost RC but for the former it might not unless it is specifically configured to detect something like throttle low (see https://dev.px4.io/en/advanced/parameter_reference.html#RC_FAILS_THR).