Hello,
I ran command
roslaunch px4 mavros_posix_sitl.launch
then I ran a command
rosrun my_ros_package offb_node
offb_node is the executable file of offb_node.CPP, provided by PX4 website mavros_offboard
then I met an error like this image:
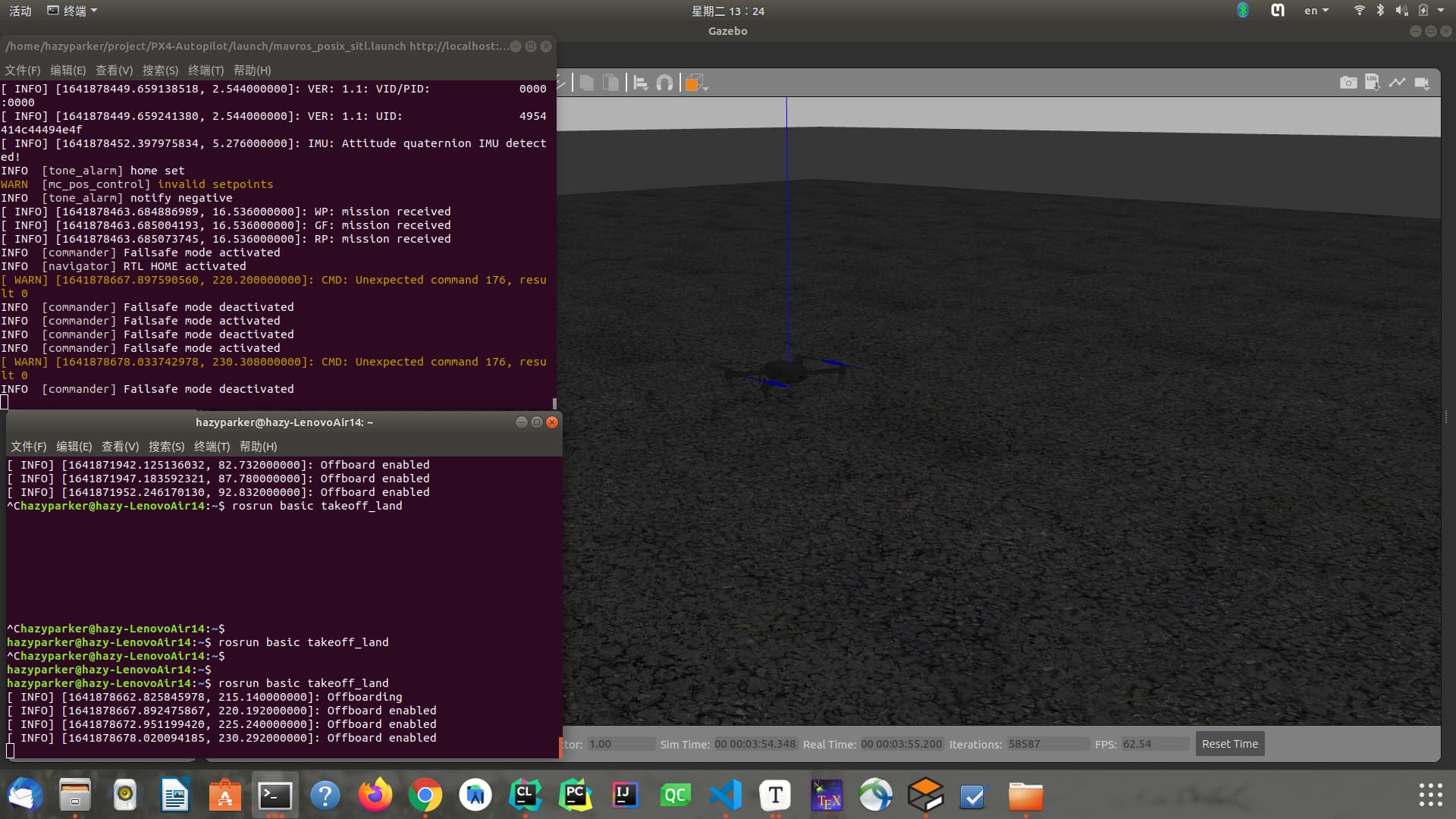
- the program sink in the loop of changing the mode from offboard to armed
- failsafe mode somehow activating, and being deactivated, keeps going, never stop
- the plane can never takeoff
if were any solutions. please tell me, thank you