abishu
1
I am trying to use the ekf2 replay as in: https://dev.px4.io/v1.8.2/en/debug/system_wide_replay.html
PX4 verison: v1.8.2
My orb_publisher.rules:
restrict_topics: sensor_combined, vehicle_gps_position, vehicle_land_detected
module: replay
ignore_others: false
replay_params.txt: untouched with flight log.
Log file type: ulog.
command run: make posix none
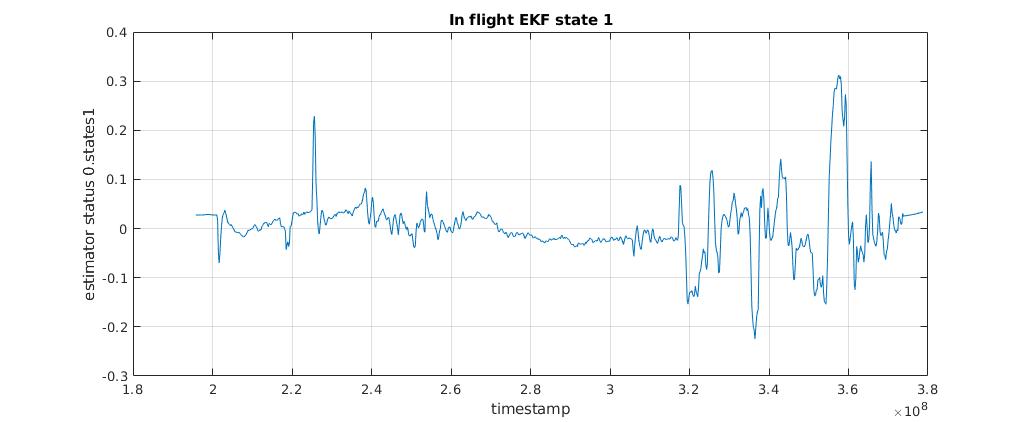
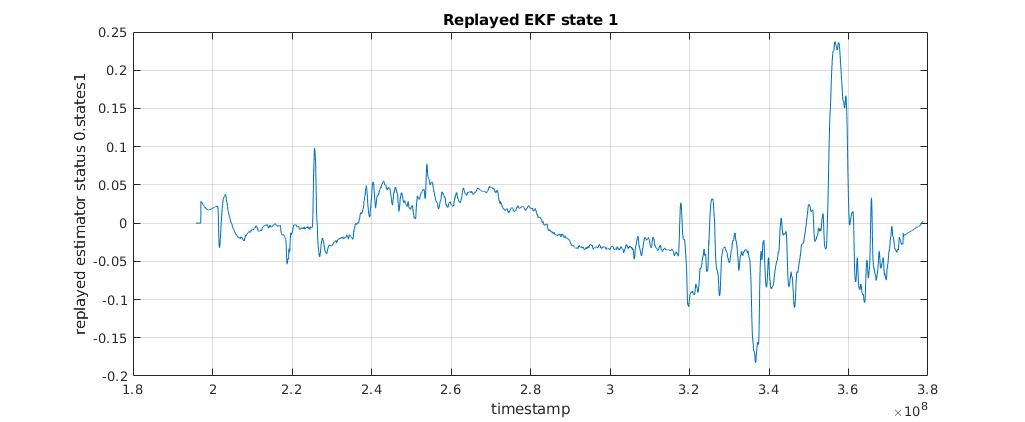
The replay estimate and real flight values don’t match. On plotting estimator ->state 1 for instance:
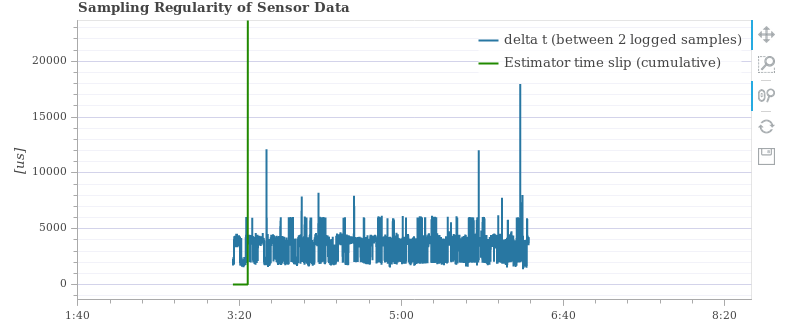
Also in replay alone i had a huge timeslip after approx 8-10s of logging.
Already answered in https://github.com/PX4/Firmware/issues/12504.
Please don’t double post like this. It means double work for me.
M_O
3
There was no answer for it in the link you provided, it just says that this issue been there since long time, but didn’t say why or how to solve it?
5 years later. Wow, what a necropost!
I suggest to open a new thread, give some context what you’re trying to do, explain your issue, what you tried, what happened, your questions, etc.
Otherwise, I’m not sure how I could help with that.