Hello,
I had a VTOL transition way too early into FW mode because of incorrect airspeed sensor data.
I am using an MRO airspeed sensor: 3DR
Here is airspeed sensor:
And here is the log: https://review.px4.io/plot_app?log=4b1d6194-7c9e-4f3f-bd2d-f4b4edc5508d
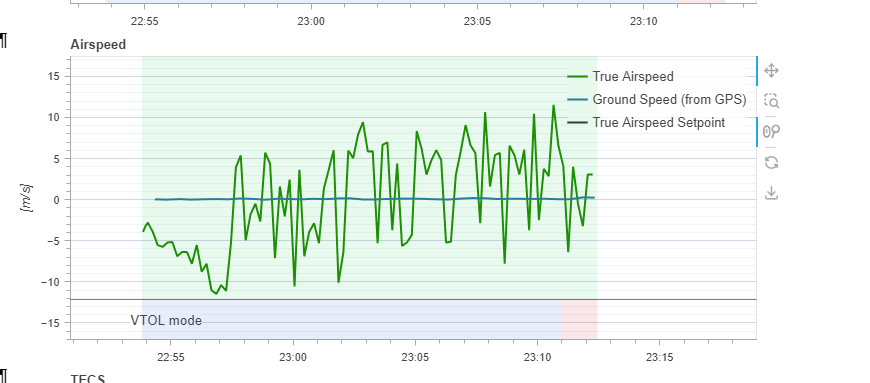
It appears that the VTOL saw that the airspeed was 10m/s and transitioned to FW early. Because the airspeed sensor was all over the place, and the aircraft was not actually traveling 10m/s the VTOL crashed.