I have a VTOL that is transitioning early. I have it paying attention to the airspeed sensor, but it appears that the transition to fixed wing does not rely on the airspeed. I have the transition airspeed set to 21. The UAV pretty much takes off in MC mode, and when i start to transition it just falls out of the sky
For 1), the best guess I have is that you got an airspeed sample that was above the threshold. Given how noisy the sensor is that is possible.
I would try to transition in airspeedless-mode (see FW_ARSP_MODE) (only after 2) is though addressed).
For 2) have you checked functionality of the pusher? You should also be able to use in in hover, see VT_FWD_THRUST_EN param.
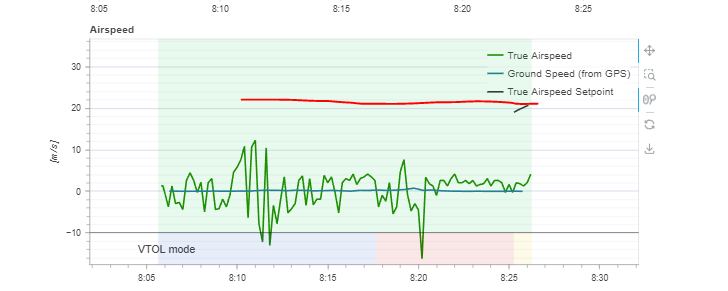
Airspeed is calculated using static and dynamic pressure data. When the airspeed is low, noise occurs in the static pressure, making airspeed calculations inaccurate.
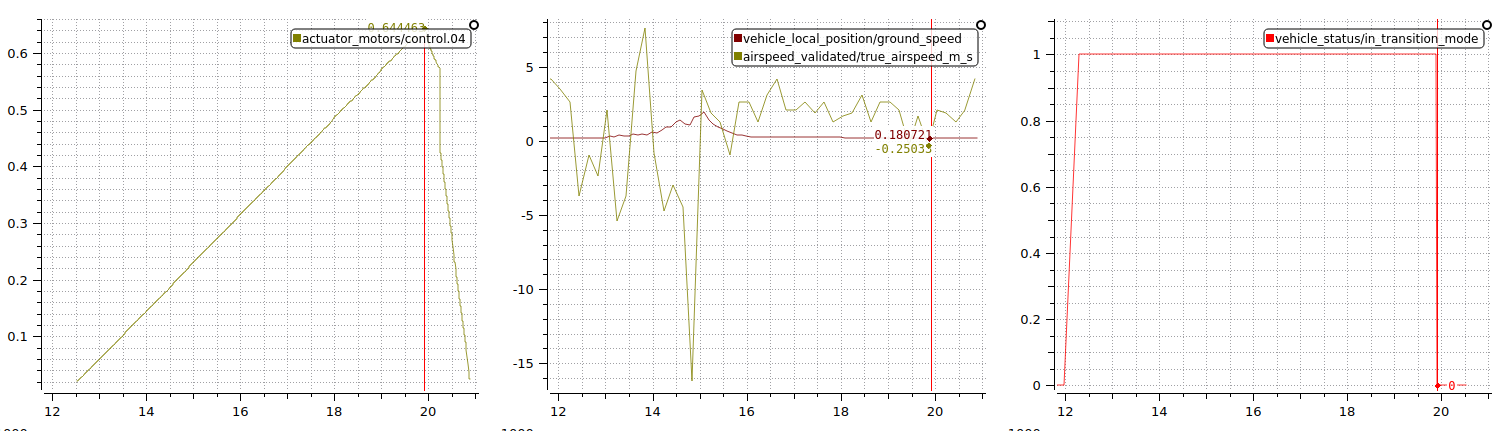
Even though they are inaccurate it does not appear that they surpass 21 m/s though
Well we don’t see a sample it the log above 21m/s, but as we only log airspeed at the low frequency of 5Hz it’s totally possible that we simply missed it by chance.
If you want to investigate that route you could reduce the logging interval here.
Yeah that makes sense to me. Going to ensure that pusher motor is working correctly, then move onto trying to clean up that airspeed sensor. If i have time will increase the logging rate
As soon as you start the pusher the MC system gets unstable, the MC motors saturate and the vehicle thus comes down.
I would first validate the MC tuning a bit more: In Stabilized or Altitude mode give it some strong pitch/roll/yaw inputs and see if it tracks decently.
Then try again with the pusher - I would though reduce VT_FWD_THRUST_SC to 0.5 for a start. If you still see a strong effect of it spinning up on the MC system then power issues are the most likely cause.
You might be able to see on this that the arms are duct taped together. this thing has already been through a few crashes. It is definitely not PID tuned correctly for MC mode, but it seems like once that back motor kicks on the other 4 lose power. From the logs the vehicle is still telling the motors to spin at high PWM values. It just seems like it doesnt have enough juice.
We are getting a replacement airframe soon. Should be able to test out on an airframe that has better MC PID values (that is more rigid of an airframe as well). THank you for taking the time to answer these questions @sfuhrer
Will post updates once we get the new airframe up in the air
This was a power module issue. The first crash must have damaged it. We figured this out by putting the VTOL in MC mode and enabling the VT_FWD_THRUST_EN parameter. Upon the back thrusting up the UAV fell out of the sky.